配置轴参数
在配置控制系统轴参数表时首先需要确定设备轴的个数、各轴的相关参数以及各轴的驱动是否是用到固高特有的伺服驱动或者是步进驱动。
如果是用到固高特有的伺服驱动或者是步进驱动,则在Janus边缘计算系统配置控制器资源自动生成轴参数Ctrl_Mtn.txt配置文件和Ctrl_Mtn_Axis.txt配置文件时,要根据实际伺服驱动和步进驱动的个数使用伺服驱动和步进驱动组件来配置控制器资源。
如果只是轴的驱动只是用到普通的驱动器,则在Janus 边缘计算系统配置控制器资源自动生成轴参数Ctrl_Mtn.txt配置文件和Ctrl_Mtn_Axis.txt配置文件的时,根据实际轴的个数需求使用轴模块(6 轴)或者轴模块(4 轴)组件来配置控制器资源。
:::note 注意 如果在使用轴模块(6 轴)或者轴模块(4 轴)配置轴参数资源时,假如设备实际用到的轴数是5个轴,如果使用轴模块(6 轴)会默认生成6个轴的参数配置,而实际只需要用到5个轴,此时在默认生成的6轴配置的参数表中可以根据需要只激活5个轴即可,这样在配置完轴资源生成配置下发轴参数配置资源的时候只会生成5个轴的资源到控制系统中。 :::
配置资源控制
如下图所示:该图轴的相关参数是根据某实际项目的实际情况,各轴的控制需求。以下是将这样的控制需求,在Janus边缘计算系统中配置,然后生成配置下发到控制系统中。

根据轴参数表,可以知道设备实际用到的轴数是4个轴,而且都是普通的驱动控制,所以在配置轴资源时只需要使用组件轴模块(4 轴)配置控制系统轴参数资源即可。首先在Janus边缘计算系统里的流程管理界面创建工程-添加控制器-点击配置即可进入配置控制器资源界面(包括轴资源和IO 模块资源),如下图所示:
配置轴模块(4 轴)资源配置的时候需要先连接控制器与轴模块(4 轴)如下图 标注2 所示,连线与实际设备控制器与轴模块的接线一致。
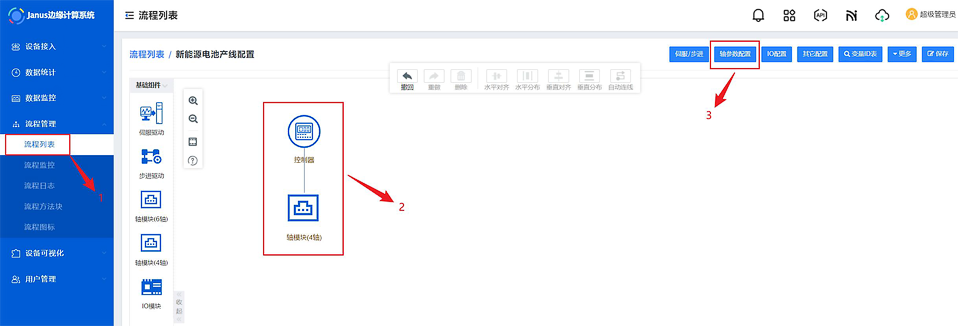
完成轴模块(4 轴)资源配置之后,即可生成4 个轴的相关参数配置,点击上图 标注3(轴参数配置)进入到各轴的具体参数配置如下图所示:
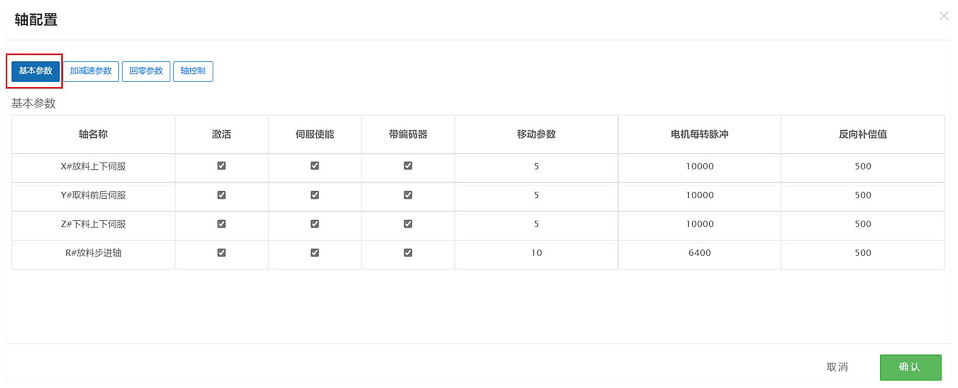
基本参数
| 参数名称 | 是否必须 | 说明 |
|---|---|---|
| 轴名称 | 是 | 根据实际的产线轴命名即可,无硬性要求; |
| 激活 | 是 | 勾选表示激活该轴,默认勾选激活状态;如果不需要下发该轴到控制系统,可取消勾; |
| 伺服使能 | 是 | 勾选表示该轴伺服使能,默认勾选; |
| 带编码器 | 是 | 勾选表示该轴带编码器,默认勾选; |
| 移动参数(导程/带轮周长) | 是 | 根据实际电机转一圈的螺距,单位:毫米; |
| 电机每转脉冲数 | 是 | 根据实际电机转一圈需要多少个脉冲; |
| 反向补偿值 | 否 | 默认设置为0。 |
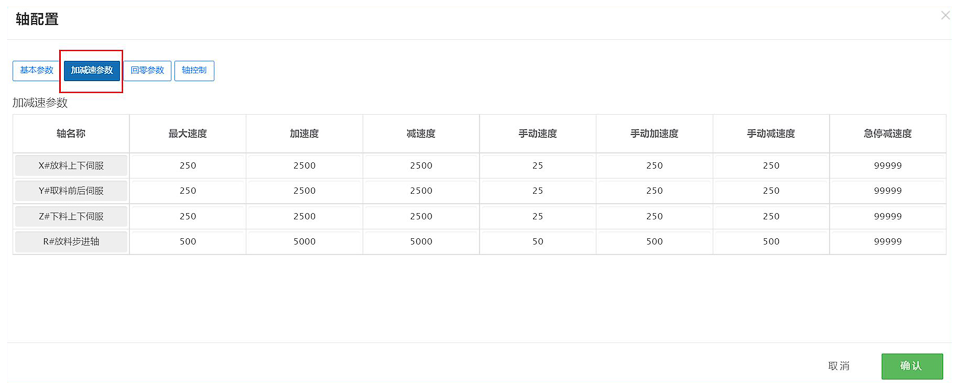
加速度参数
| 参数名称 | 是否必须 | 说明 |
|---|---|---|
| 最大速度 | 是 | 移动轴最大速度单位为毫米每秒,旋转轴最大速度为度每秒根据伺服电机、步进电机的移动参数以及伺服电机最大转速3000r/min(最大转速4500r/min),步进电机最大转速600r/min来求得相应轴的最大速度、加速度、减速度等等。 伺服轴最大速度:移动参数*最大转速/60=5*5000/60=250毫米/秒(具体的轴移动参数根据实际设置); 步进轴最大速度:移动参数*最大转速/60=10*600/60=100毫米/秒(具体的轴的移动参数根据实际设置)。 |
| 加速度 | 是 | 伺服轴加速度:最大速度/0.1=250/0.1=2500毫米/秒22; 步进轴加速度/减速度:最大速度/0.1=100/0.1=1000毫米/秒2。 |
| 减速度 | 是 | 伺服轴加速度:最大速度/0.1=250/0.1=2500毫米/秒22; 步进轴加速度/减速度:最大速度/0.1=100/0.1=1000毫米/秒2。 |
| 手动速度 | 是 | 一般在调机的时候使用,比最大速度小即可。 |
| 手动加速度 | 是 | 比加速度小即可。 |
| 手动减速度 | 是 | 比减速度小即可。 |
| 急停减速度 | 是 | 越大越好,一般设置为减速度或手动减速度的1000倍。 |
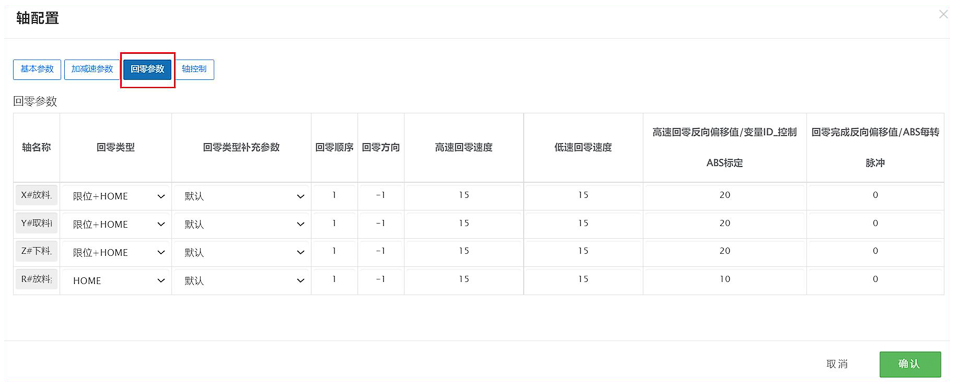
回零参数
| 参数名称 | 是否必须 | 说明 |
|---|---|---|
| 回零参数 | 是 | 总的回零类型有10种可供选择,分别是:开机为零点、限位、HOME、HOME+INDEX、绝对值、限位+HOME、INDEX、板卡控制回零、EtherCat回零,根据实际选择即可; |
| 回零类型补充参数 | 是 | 选定回零类型的时候会自己默认生成对应的回零类型补充参数; |
| 回零顺序 | 是 | 即轴回零的相应顺序,按序号排列,从1开始即可; |
| 回零方向 | 是 | 1 为正向,-1 为负向; |
| 高速回零速度 | 是 | 根据实际电机运动现象设置 |
| 低速回零速度 | 是 | 根据实际电机运动现象设置 |
| 高速回零反向偏移值/ 变量ID_控制ABS标定 | 是 | 即回零时运动的步长,单位毫米。回零完成反向偏移值;即反向回零时运动的步长,单位:毫米。 |
| 回零完成反向偏移值/ ABS每转脉冲 | 是 | 根据实际需求设置,单位:毫米。 |
轴控制

| 参数名称 | 是否必须 | 说明 |
|---|---|---|
| 输出点ID_控制刹车 | 否 | 默认设置成0即可; |
| 输入点ID_运动到位信号 | 否 | 默认设置成0即可; |
| 是否为移动轴 | 是 | 勾选表示该轴为移动轴,不勾选表示该轴不是移动轴,默认不勾选; |
| 变量ID_控制编码器清零 | 是 | 上升沿有效,1/0,默认设置为0; |
| 变量ID控制运动停止 | 是 | 上升沿有效,1/0,默认设置为0。注意:该位置配置是手动自动模式下都可以停止轴。 |
生成配置文件
配置完轴参数配置之后,点击 保存 ,然后点击更多 - 生成配置 ,等待轴参数配置文件生成成功即可。
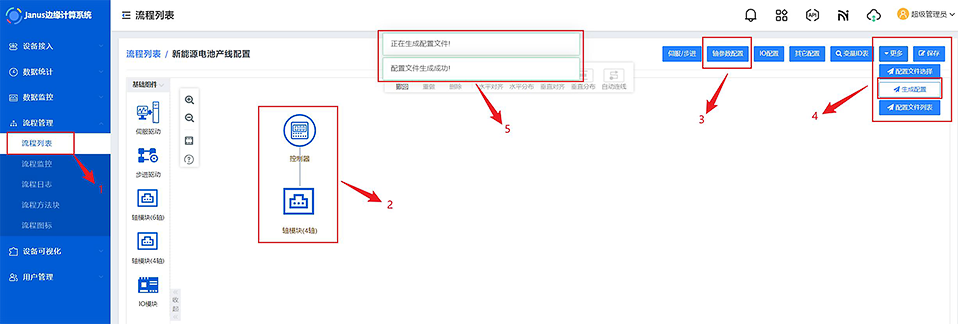
:::note 注意 在配置完轴参数生成配置文件之前需要点击保存,否则可能导致生成的配置文件内容不全。 :::
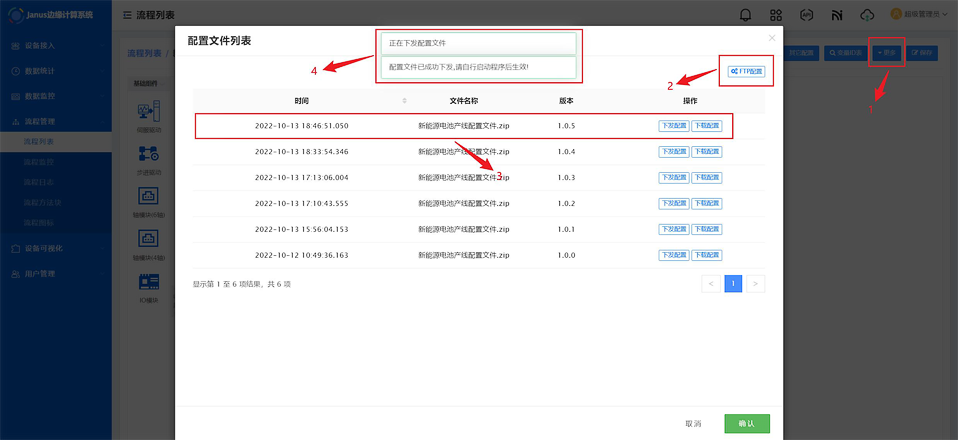
轴参数配置文件生成成功之后,就可以通过配置Ftp服务的路径下发配置文件到指定的控制系统文件夹供系统调用,或通过下载配置的方式把轴参数配置文件拷贝到指定的控制系统文件夹供系统调用。
:::note 注意
- 在生成轴参数配置文件的过程中,会默认生成IO参数的配置文件。对于GNC系列的控制器自带8个本地输入点DI以及8个本地输出点DO,轴模块(6 轴)自带16个本地输入点DI 和10个本地输出点DO,轴模块(4 轴)自带22个本地输入点DI 和16个本地输出点DO,本地输入输出点都是属于运控上面的IO点。
- 生成的轴参数配置文件Ctrl_Mtn.txt 和Ctrl_Mtn_Axis.txt,可以在控制系统的系统盘C 盘或者D 盘Ftp\EasyAutoSystem\System\ParaFiles 文件目录下找到。 :::