配置控制卡参数
使用“Mct2008”调试软件配置各轴基本参数(是否有驱动报警,是否有正负限位,脉冲方向是否正确,编码器反馈方向是否正确)。结合自动化调试软件,确定输入点驱动报警、正负限位电平是否正常以及输出点伺服使能、清除报警电平是否正常。(默认都是低电平有效)最终根据实际的控制卡内核个数,在EasyAutoSystem_CE/System/ParaFiles 文件夹目录下生成配置文件Mtn_1_Cfg,GUS 系列控制卡内核个数为1,如下图所示。
驱动报警、正负限位
根据实际的现场需求,确定轴是否有驱动报警、正负限位。一般伺服电机有驱动报警,步进电机没有驱动报警。相关配置如下图所示:
如果对应的轴有驱动报警、正负限位,则在相应的位置写上对应的轴编号(注意18 对应18 轴)。如果没有驱动报警、正负限位则在相应的位置写上none(none 表示屏蔽该轴驱动报警、正负限位)。

确认脉冲方向、编码器反馈方向是否一致
脉冲方向一致指给定轴的脉冲方向与规划的脉冲方向一致。
若规划的脉冲方向与实际的脉冲方向相反会导致轴运动方向反向:
伺服电机:可以通过调换伺服驱动的方向线(PULSE+和PULSE-互换);
步进电机:可以通过调换步进驱动的方向线(Dir+和Dir-互换)。
编码器反馈方向一致指的是给定位置与当前位置(或者是规划位置与实际位置)的方向一致。如果当前位置与给定位置(实际位置与规划位置)的方向相反,需要利用“Mct20008”对对应的轴进行编码器反馈方向取反,如下图所示:
编码器反馈方向输入脉冲反转方向。当轴编码器反馈方向需要取反时,在encoder目录下,首先encoder索引即轴号索引(1 代表1 号轴)输入脉冲反转选择反向,脉冲计数源选择编码器即可。
输入点驱动报警、正负限位电平
利用“Mct2008软件”或者是“自动化调式软件”观察各轴输入点驱动报警、正负限位信号是否与实际的相符合。如果在确保实际轴没有驱动报警以及正负限位还没到实际限位信号的情况下,而“Mct2008 软件”和自动化软件都显示驱动报警,正负限位显示已到达限位信号,即输入点驱动报警电平、正负限位电平与实际电平相反。这时就需要利用“Mct2008 软件”对输入点驱动报警、正负限位电平进行取反配置,具体的电平方向根据实际设置。相关的配置如下图所示:
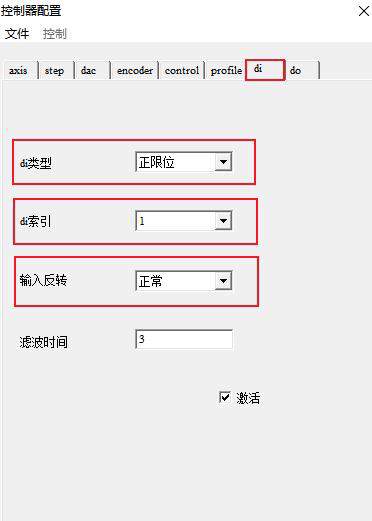
在输入点di目录下,di类型包含正限位、负限位、驱动报警、原点、通用输入、电机到位、手轮。这里我们选择单个单个配置即可。di索引即轴号索引(1 代表1 号轴)。输入反转包含正常和取反,具体的输入方向根据我们实际电平设置。
输出点伺服使能电平
利用“Mct2008 软件”或者是“自动化调式软件”观察各轴输出点伺服使能是否与实际的相符合。如果在确保实际轴伺服使能正常的情况下,而“Mct2008 软件”和自动化调试软件都显示伺服没上使能,即输出点伺服使能电平与实际电平相反。这时就需要利用“Mct2008 软件”对输出点驱动报警、正负限位电平进行取反配置具体的电平方向根据实际设置。相关的配置如下图所示:
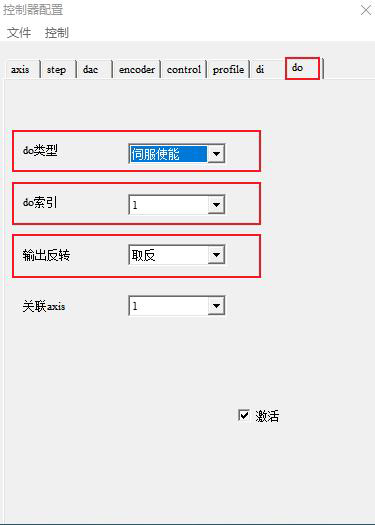
在输出点do 目录下,do 类型包含伺服使能、清除报警、通用输出,这里选择伺服使能。do 索引即轴号索引(1 代表1 号轴)。输出反转包含正常和取反,具体的输出方向根据我们实际电平设置。