案例二:单轴增量运动程序
提示
学习本案例前推荐先完成学习案例一:循环运行跑马灯的操作步骤,部分基础配置内容在本案例中将不再赘述。
一、案例需求
- 要求轴做点位增量运动,在人机界面上可以自定义轴速率和坐标,同时实现轴位置的实时监控;
- 在人机界面上利用系统默认变量实现实现轴运动流程的启动、暂停和回零;
二、设计思路
- 增量运动指轴按给定的坐标值自行增量,例如轴运动的第1个坐标值是100,那么第2个坐标轴会运动到坐标点200(100+100),第3个坐标点300(100+100+100);
- 虚拟模式下轴运动是直接由系统计算完成,需要添加延时模块才能清晰监控到轴坐标变化;
三、案例开发步骤
(一)配置硬件资源
- 打开流程管理工程主页,点击进入
硬件配置 → 配置硬件页面。

- 在左侧硬件栏中拖入一个
伺服驱动组件,与控制器进行连线。
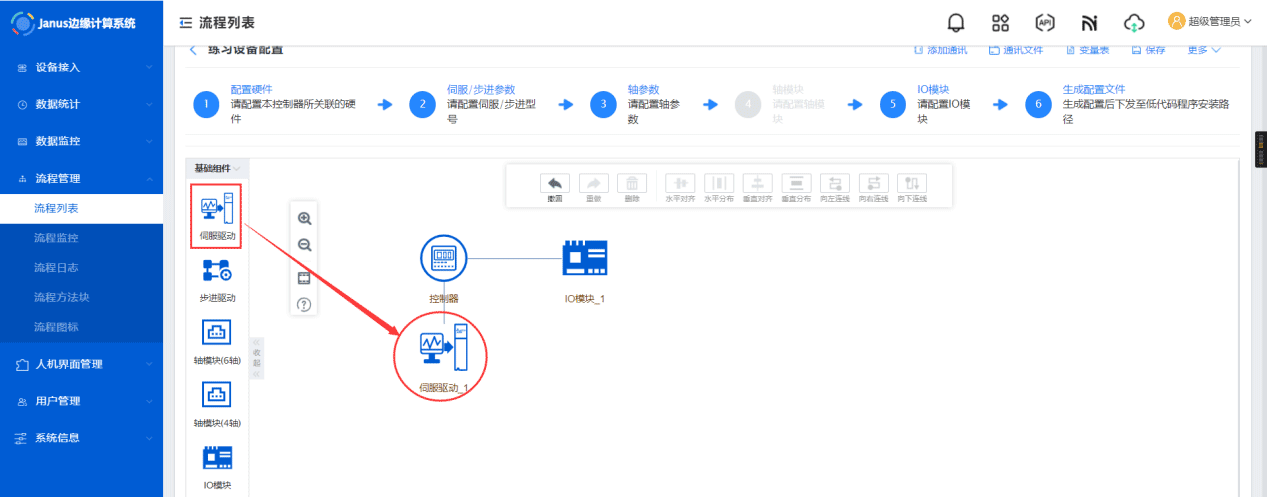
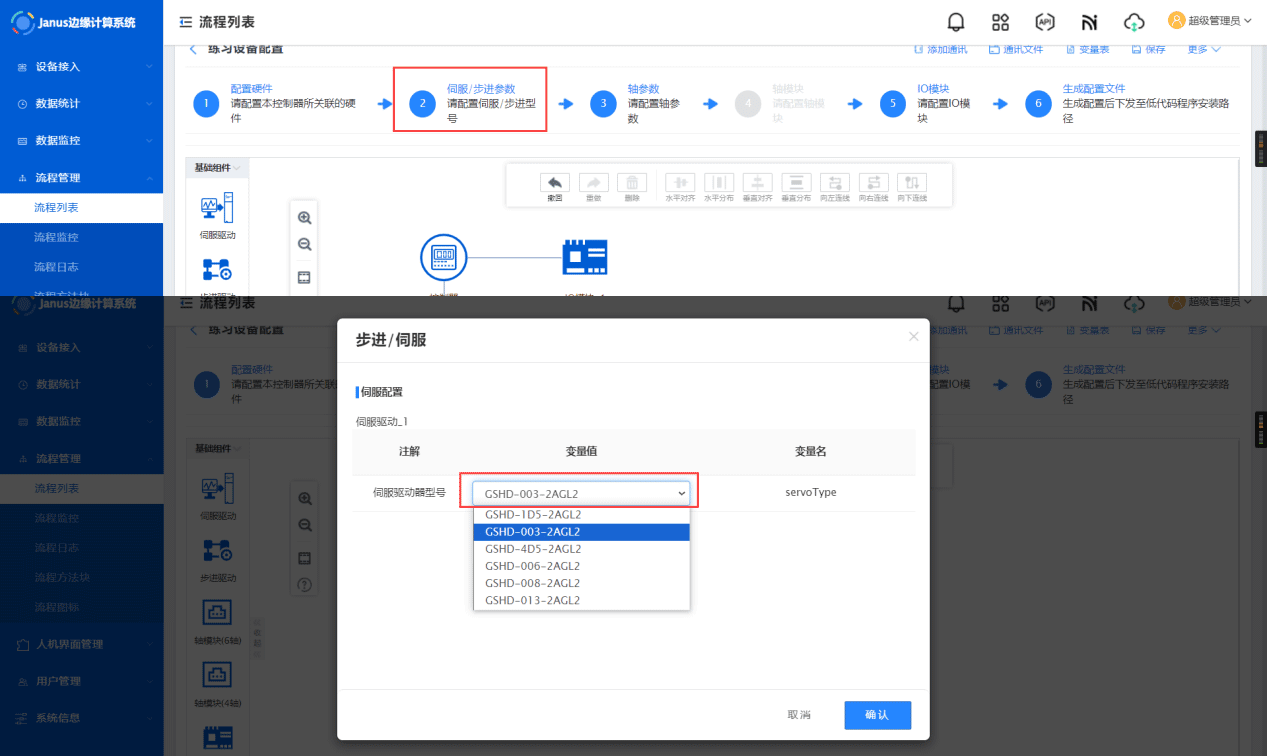
- 点击
伺服/步进参数,打开伺服/步进型号选择窗口,选择伺服驱动器型号为GSHD-003-2AGL2,点击确认返回硬件配置页面。
- 点击
轴参数,弹出轴参数配置窗口,在基本参数页签中,填入自定义的轴名称,勾选激活、伺服使能、带编码器、是否为轴移动。移动参数、电机每转脉冲和反向补偿值可根据实际需求设置,本案例使用系统默认值。
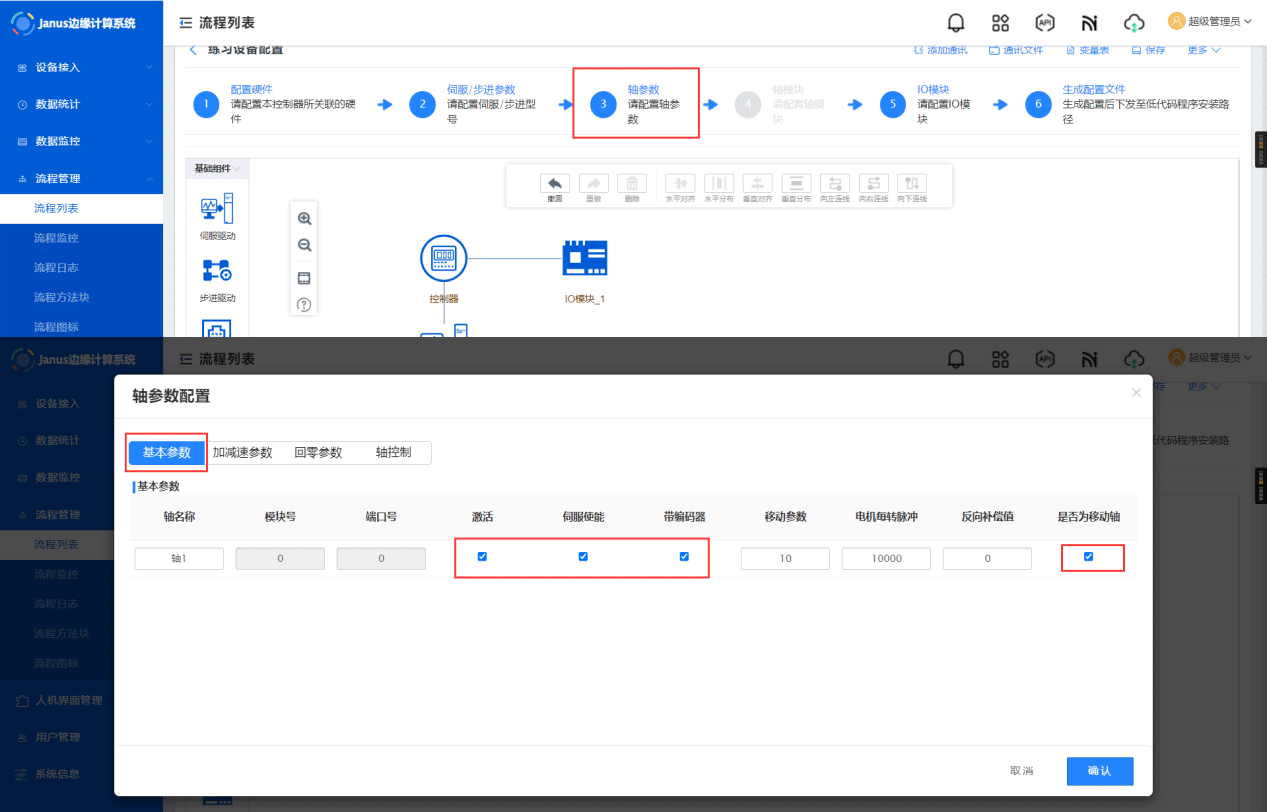
:::note 加速度参数、回零参数、轴控制
轴参数配置窗口中加速度参数、回零参数、轴控制的配置内容,可根据实际需求设置,本案例使用系统默认参数。
更多回零参数说明见回零及回零保护
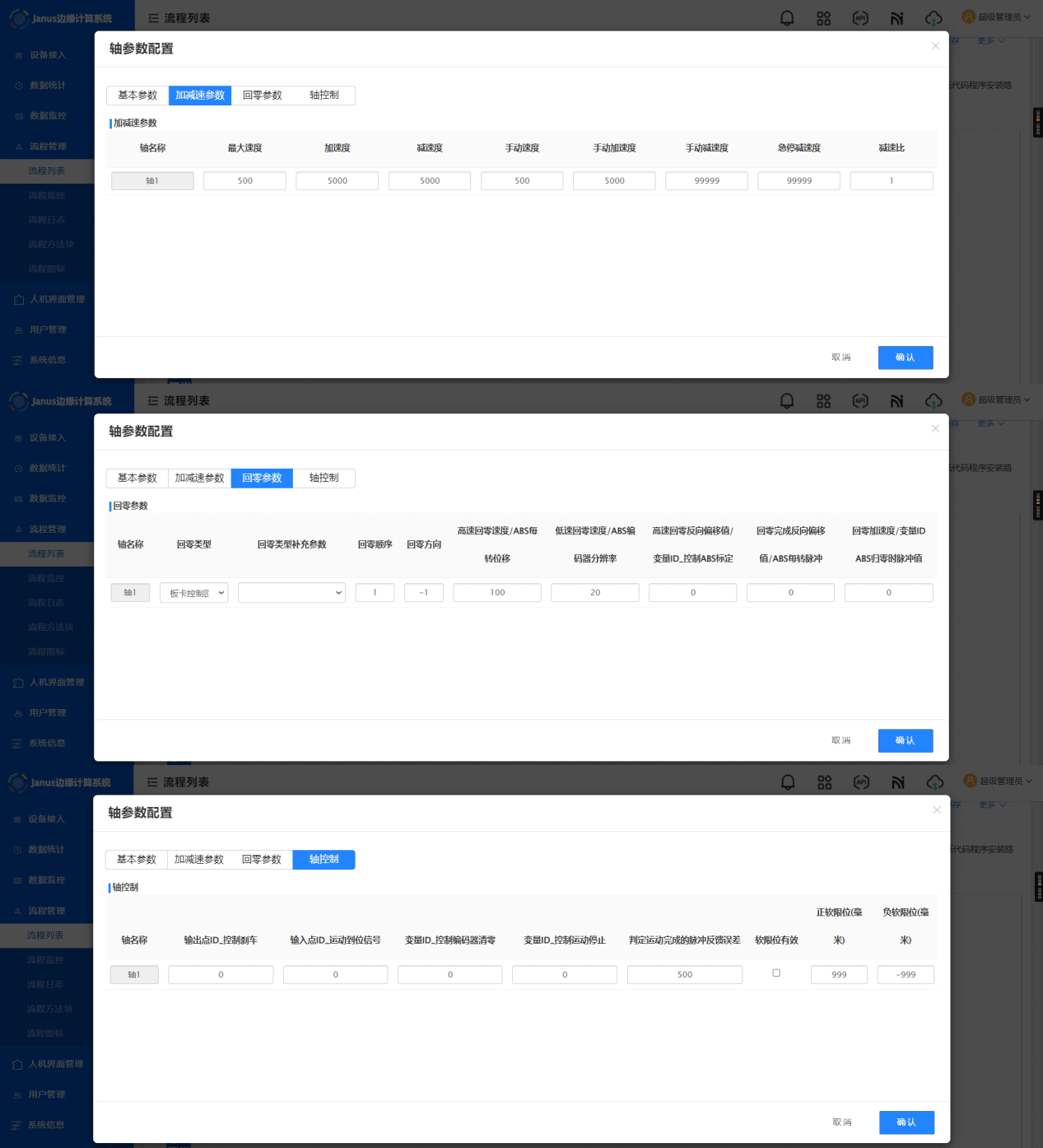
:::
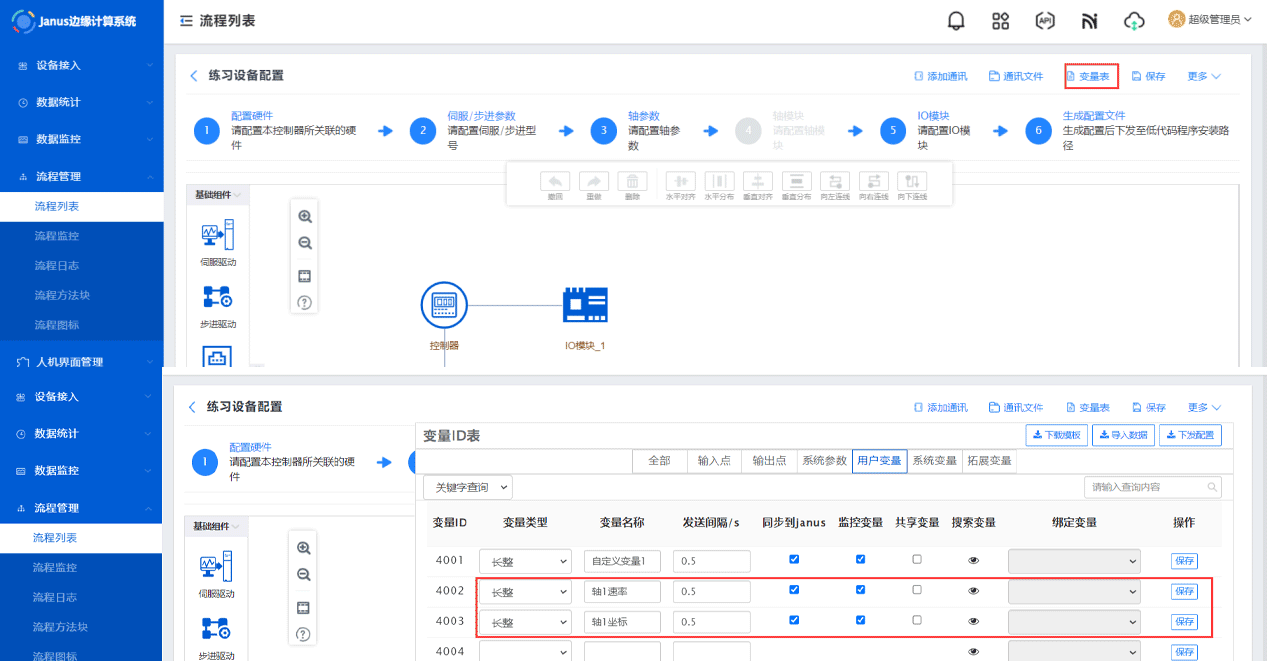
(二)定义变量
-
点击
变量表,点击用户变量标签页,定义以下变量:4002:轴1速率,4003:轴1坐标
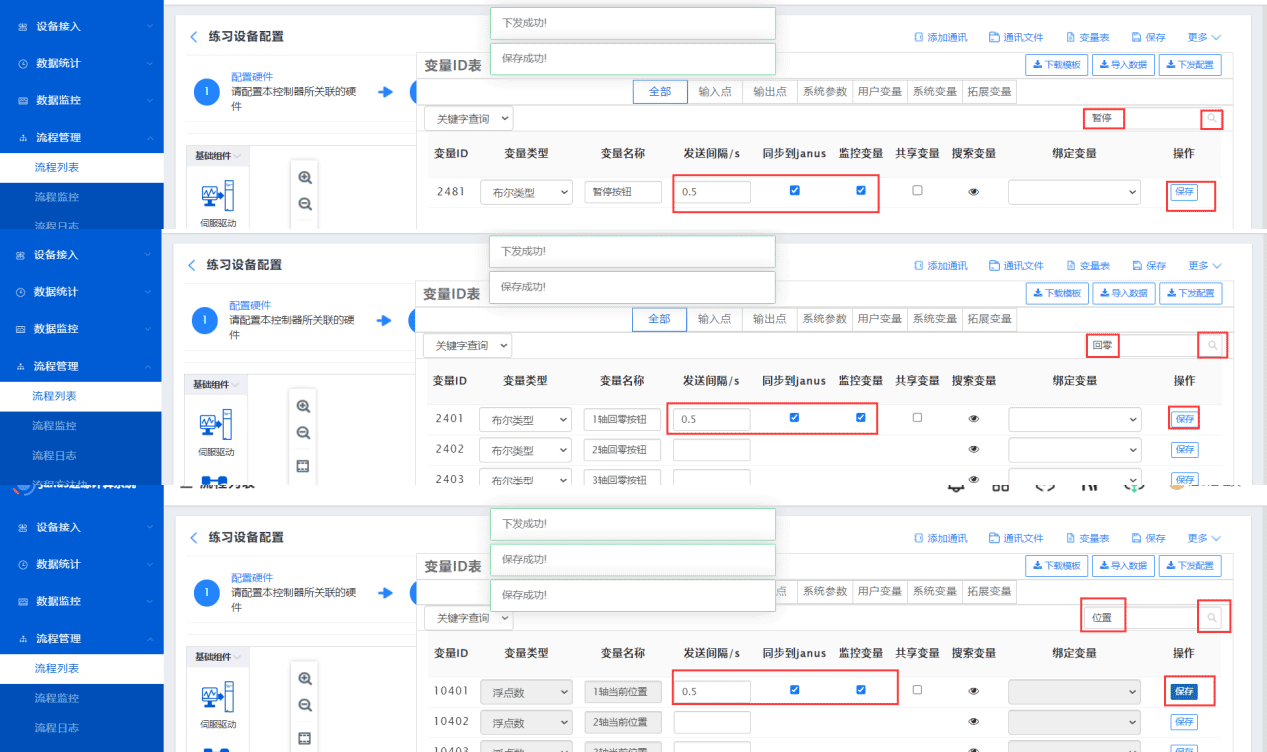
- 点击
全部列表标签页,在搜索栏输入启动并点击🔍图标,设置变量2451的发送间隔,勾选同步到Janus和监控变量,点击保存。

- 同样地分别搜索
暂停、回零、位置关键字,分别找到变量2481、2401、10401,设置发送间隔,勾选同步到Janus和监控变量,点击保存。
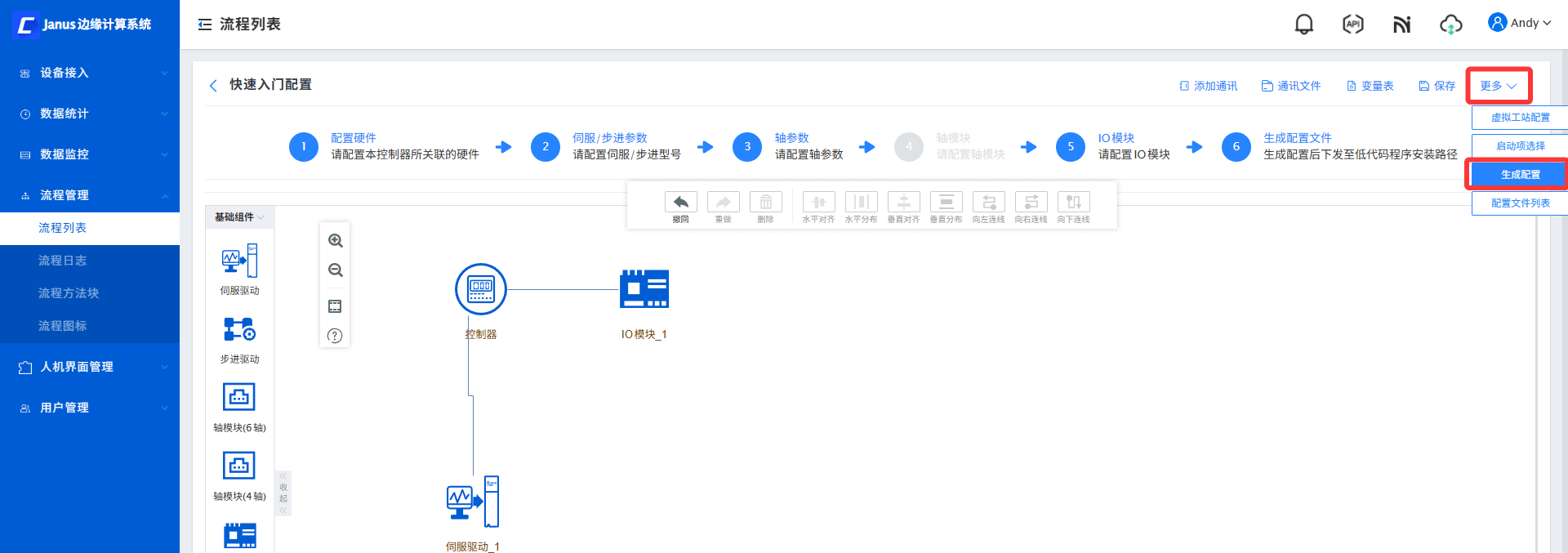
(三)配置下发
- 返回硬件配置页面,点击
更多 → 生成配置,等待配置文件生成。
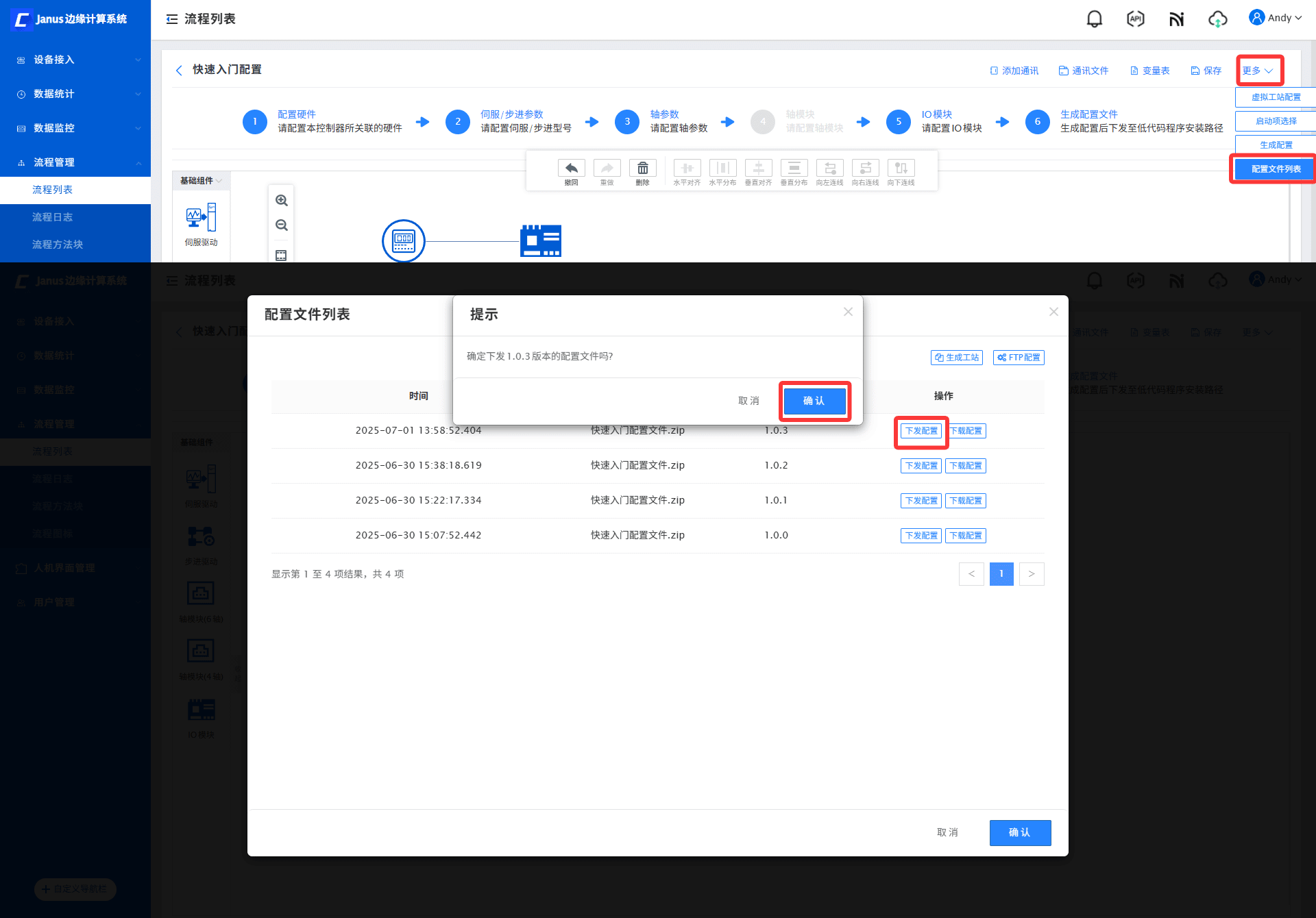
- 点击
配置文件列表进入配置下发界面,在窗口列表中定位到最新生成的配置文件,点击下发配置,弹出窗口点击确认,等待配置文件下发成功后,返回项目主页。
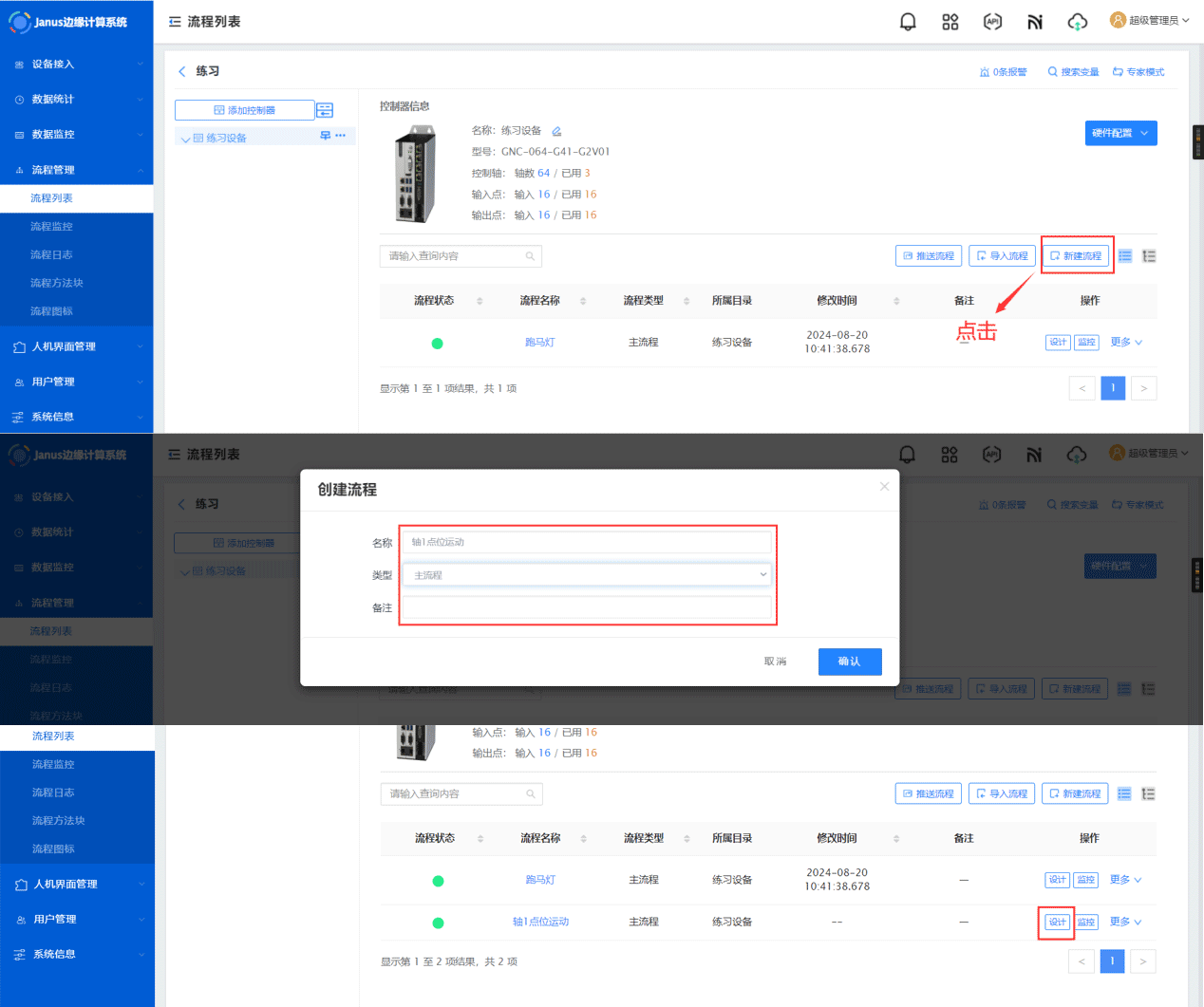
(四)新建流程
在项目主页流程列表中,点击新建流程,在对话框的名称输入框中输入自定义的流程名称,类型选择主流程,完成创建后点击设计进入流程设计界面。
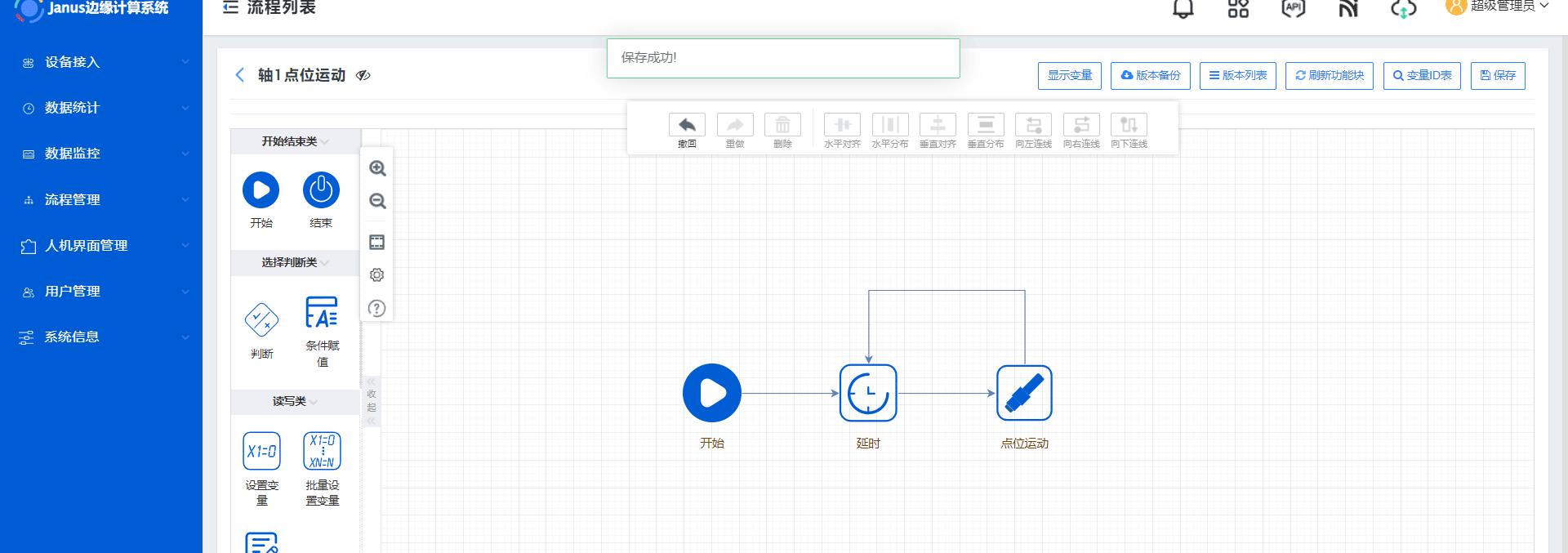
(五)流程设计
- 从左侧功能块栏拖拽1个
开始功能块、1个延时功能块,1个点位运动功能块到画布中,并按照下图连线。
:::tip 提示 更多功能块具体用法请参考低代码功能块介绍。 :::
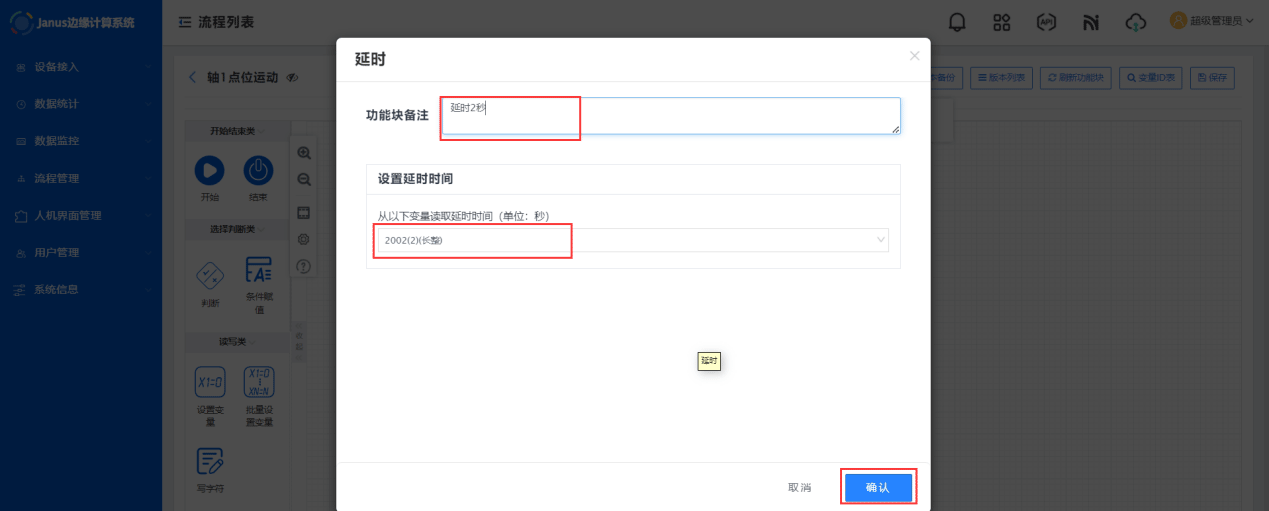
- 双击
延时功能块,在弹出的对话框填入备注为延时2秒,在设置延时时间的输入框中输入2002,并选择2002(2)(长整),点击确认返回设计界面。
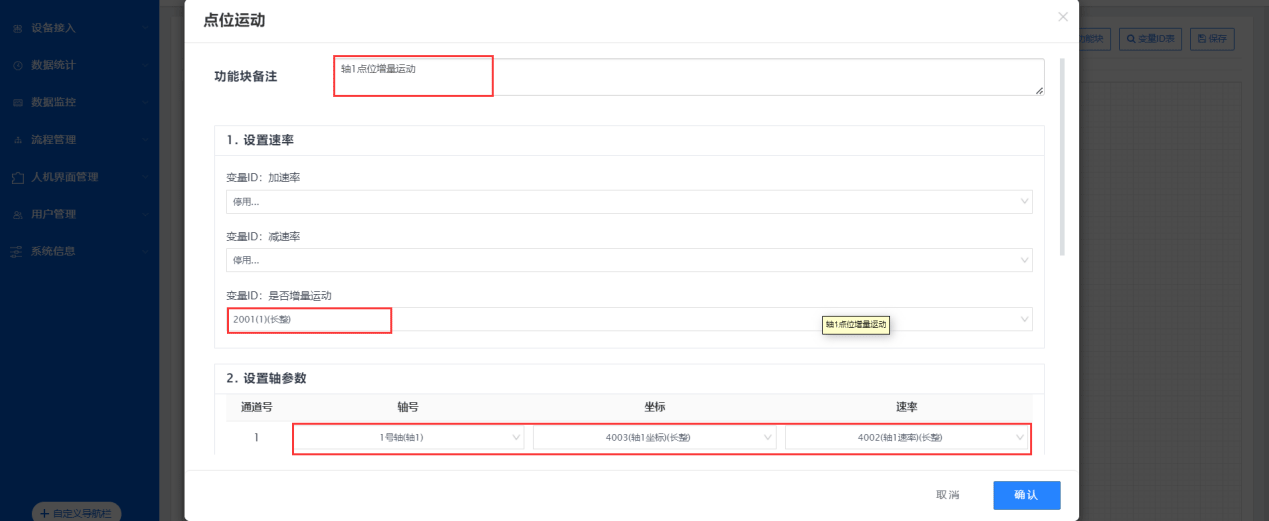
- 双击
点位运动功能块,在对话框中执行以下设置,完成后点击确认返回设计界面:- 填入备注为
轴1点位增量运动; - 在变量ID:是否做增量运动输入框中输入
2001,并选择2001(1)(长整)(若不设置默认为不做增量运动); - 在轴号列中下拉选择
1号轴(轴1); - 在坐标列输入
4003,并选择变量4003(轴1坐标)(长整); - 在速率列输入
4002,并选择变量4002(轴1速率)(长整);
- 填入备注为
(六)流程推送
- 点击
保存,点击推送到控制器
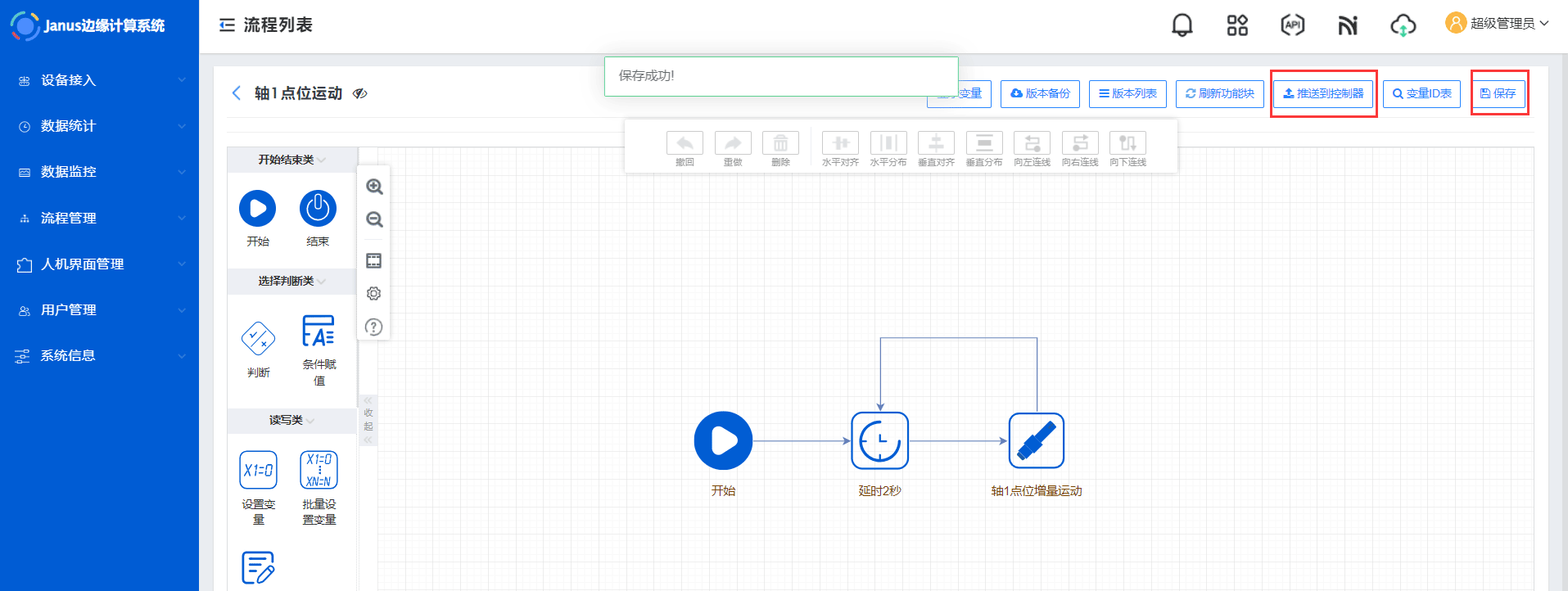
- 在对话框中定位到当前设计的流程,勾选
发送流程信息,点击确定下发流程。

(七)制作人机组态界面
/* 可查看[单轴增量运动人机组态界面制作视频教程], */ 更多内容见[低代码人机交互组态软件-快速入门]了解详细的人机组态界面的制作方法。