低代码功能块介绍
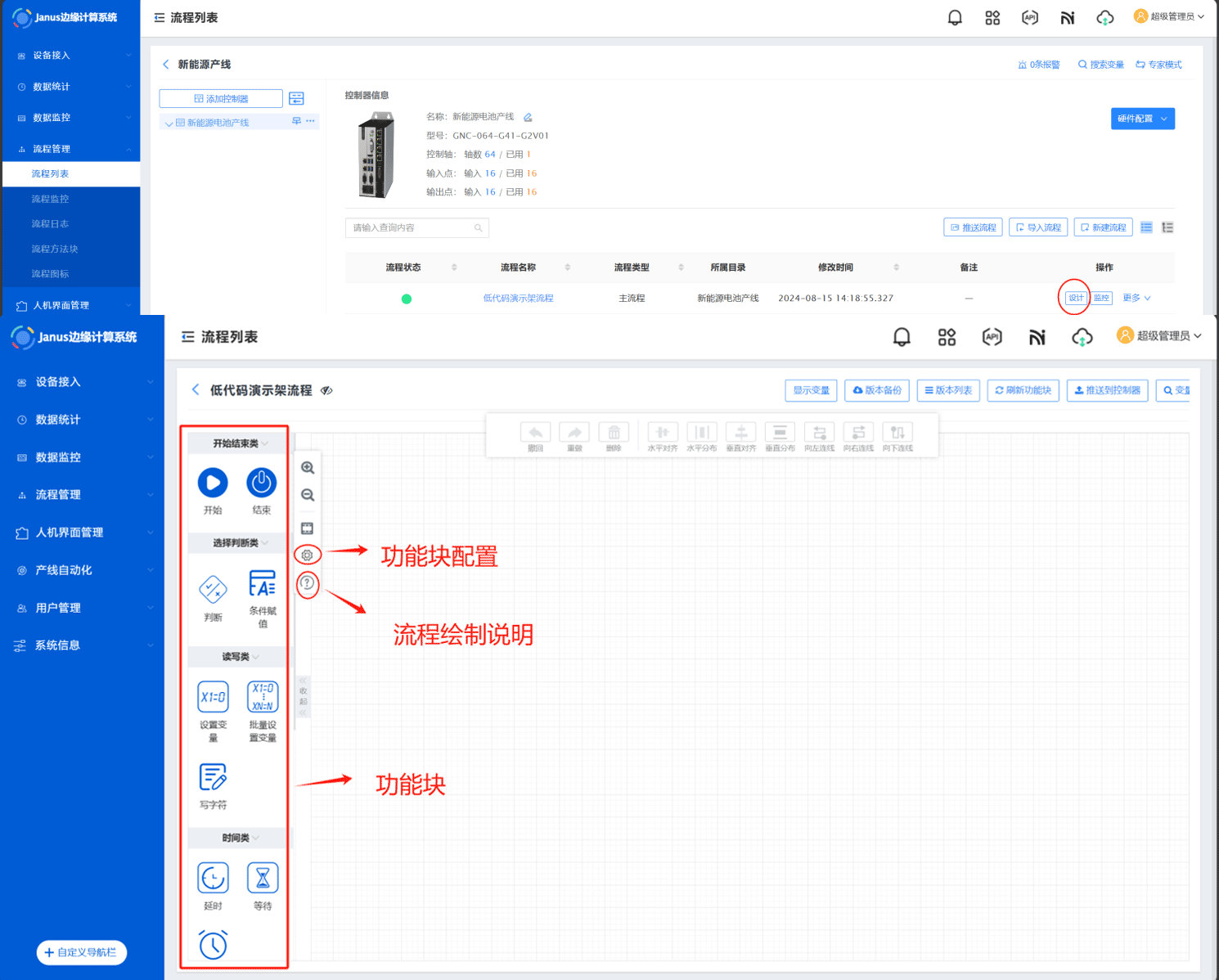
在完成控制器资源的配置,并成功生成/下发配置文件以及配置变量ID表后,即可进行创建流程操作。
本例中以流程名称低代码演示架流程为例。如图所示,在创建流程完成后,点击设计按钮将进入流程编辑界面。在该界面中,可以通过拖拽左侧的功能块将其添加到编辑区域,双击功能块可对其进行注释编辑。
:::tip 温馨提示 为了在流程报警时能够显示清晰的信息并快速定位问题,建议在编辑功能块注释时做到见名知意。 :::
流程编辑界面共支持16种类型的功能块,包括:开始、选择、子流程、条件赋值、结束、设置变量、批量设置变量、延时、等待、多轴联动、连续运动、点位运动、直线插补、圆弧插补、计时器和写字符。
| 组件名 | 描述 |
|---|---|
| 开始 | 流程开始标志,主流程和子流程必需,不支持修改注释 |
| 结束 | 流程结束标志,无限循环主流程可无结束块,单次执行流程必需 |
| 判断 | 用于流程分支逻辑控制,当模块与其他功能块建立连接时会显示条件配置图标(⚙), 点击该图标可设置执行条件: 满足条件时触发绿色连线分支执行, 红色连线分支无需配置条件且在未满足条件时自动触发。 |
| 条件赋值 | 输出前条件限制,设置变量输出间的限制关系 |
| 设置变量 | 变量间运算关系设置 |
| 数组数值 | 根据索引读取数组值,常用于运动坐标取值 |
| 批量设置变量 | 变量数值批量赋值 |
| 写字符 | 变量写入字符控制设备,注意中英文字符字节差异(1字节/2字节),通过TcpUdp.txt配置通讯 |
| 延时 | 设置延时时间(单位:秒),通过变量控制延时时间 |
| 等待 | 等待设定时间内满足执行条件进入下一流程,用于超时报警/提示功能 |
| 计时器 | 最多50个计时器,支持小时/分钟/秒拆分,流程暂停时计时器行为可配置 |
| 多轴联动 | 单/多轴同步运动(相同速度) |
| 连续运动 | 单轴连续运动 |
| 点位运动 | 单/多轴点位运动(可设置不同速度) |
| 直线插补 | 至少2轴参与,规划轴映射到机台坐标系实现轨迹控制 |
| 圆弧插补 | 同直线插补要求,实现圆弧轨迹 |
| 子流程 | 拆分复杂流程,主流程调用子流程实现模块化设计 |
开始
为流程开始标志,不管是主流程还是子流程都是必不可少的,放在流程开始位置(开始功能块和结束功能块不支持更改注释)
结束
为流程结束标志,放在流程结束位置。
:::note 注意 子流程中必须包含结束功能块,主流程的结束功能块配置具有灵活性:
- 若主流程采用无限循环模式,可省略结束功能块;
- 若主流程需单次执行后终止,则必须添加结束功能块。 :::
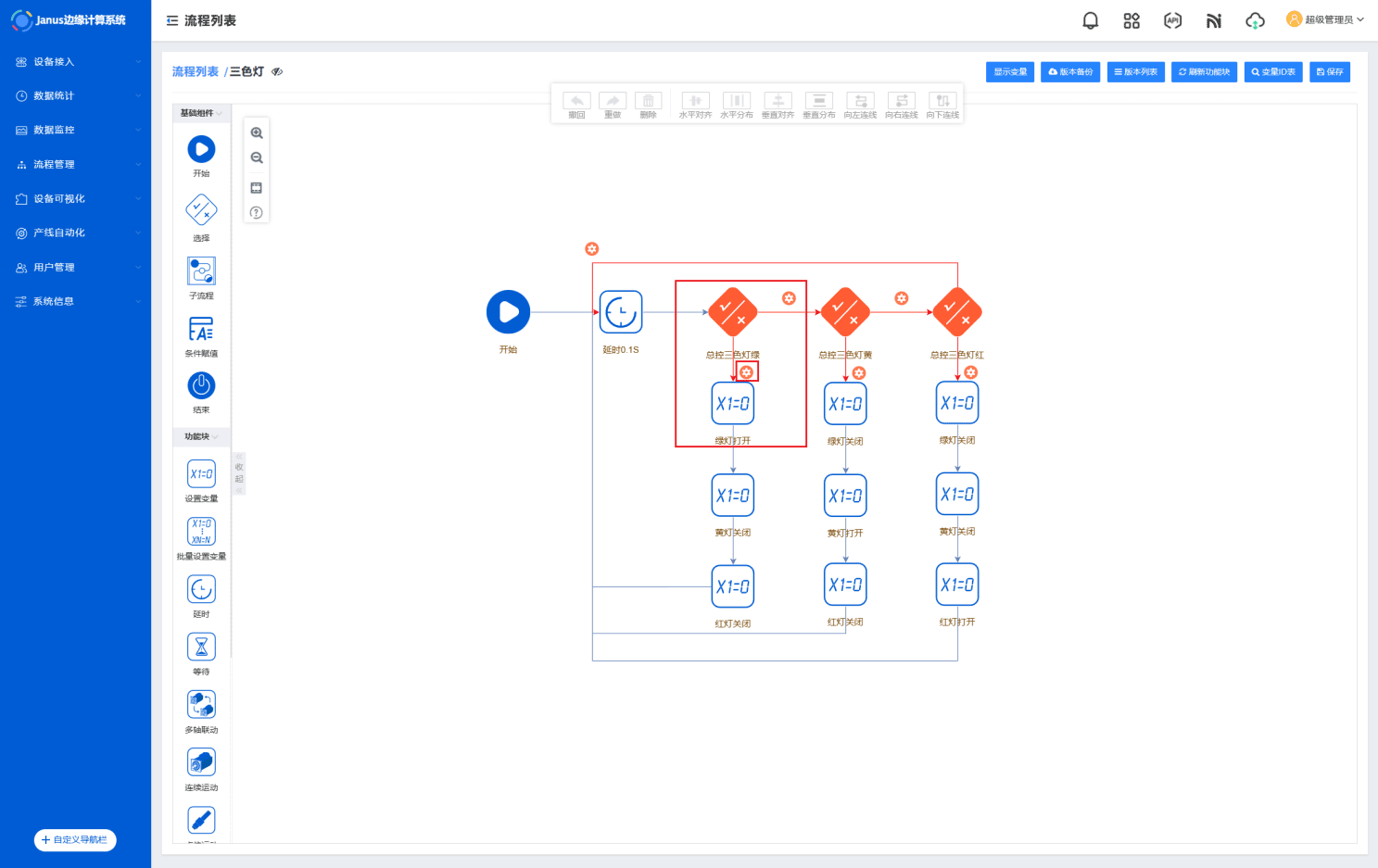
判断
当流程需要进行判断时使用,与后续模块连接时会出现⚙图标,点击可设定执行条件(满足条件执行绿色线条,否则执行红色线条,红色线条无需设定条件)。
例程如下图:
设置判断条件窗口如下:
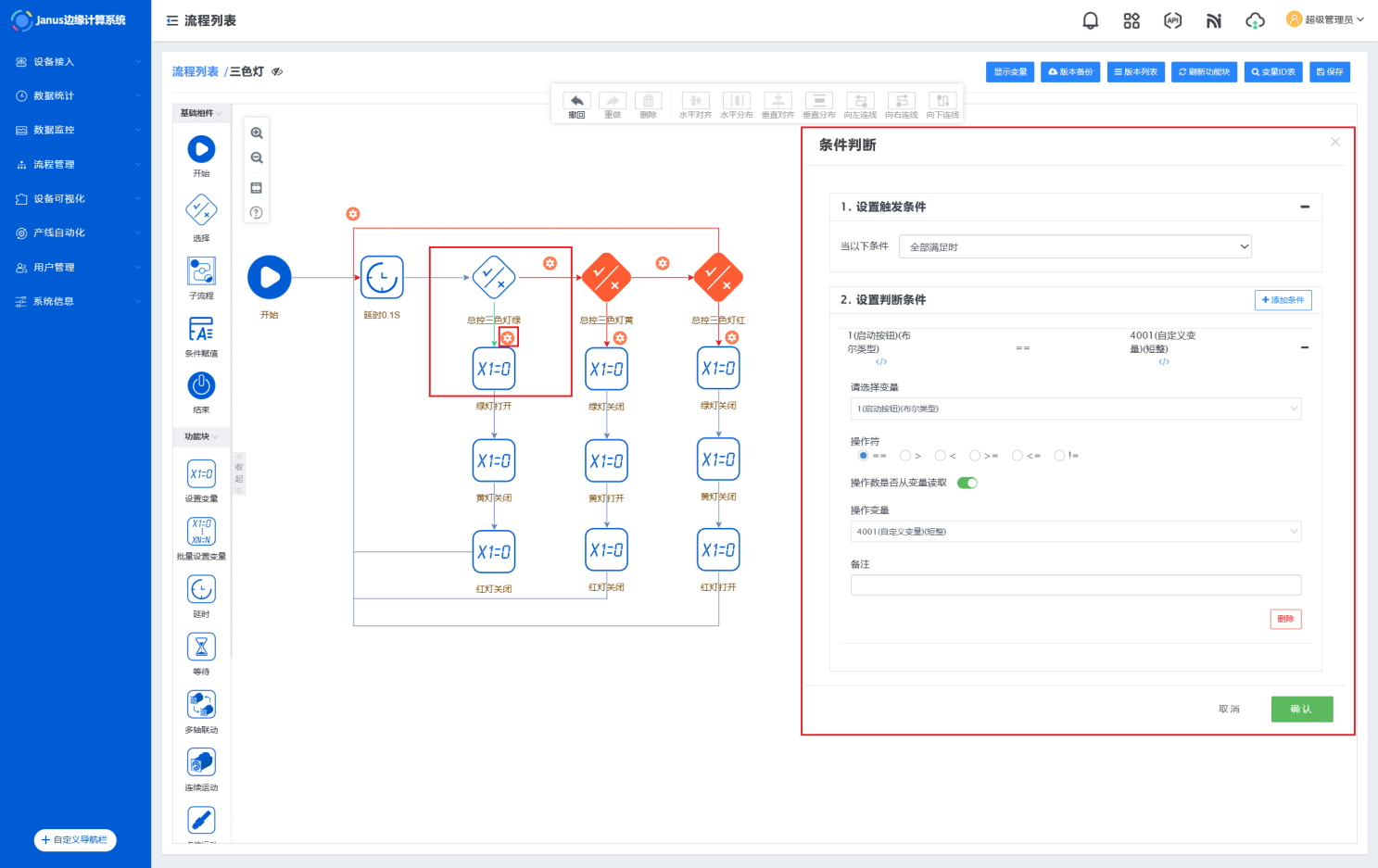
点击添加条件,在变量栏中选择需做判断的变量ID,目前操作符有六种选择,分别是:
等于(==)、大于(>)、小于(<)、大于等于(>=)、小于等于(<=)和不等于(!=)。
操作数是否从变量获取:启用后,操作数为变量(变量存储的实际数值参与比较);不启用时操作数为固定数值;
如上图所示,1是1号输入点变量,代表的是启动按钮。若变量里存的数值等于1,则此选择功能块走绿色线条部分流程,否则走红色线条部分流程。
:::note 注意 可设定一组或多组条件(逻辑与/或),逻辑与表示设定的多组条件需要同时成立才会走绿色线条部分流程,逻辑或则表示设定的多组条件只要有一组成立即可走绿色线条部分流程) :::
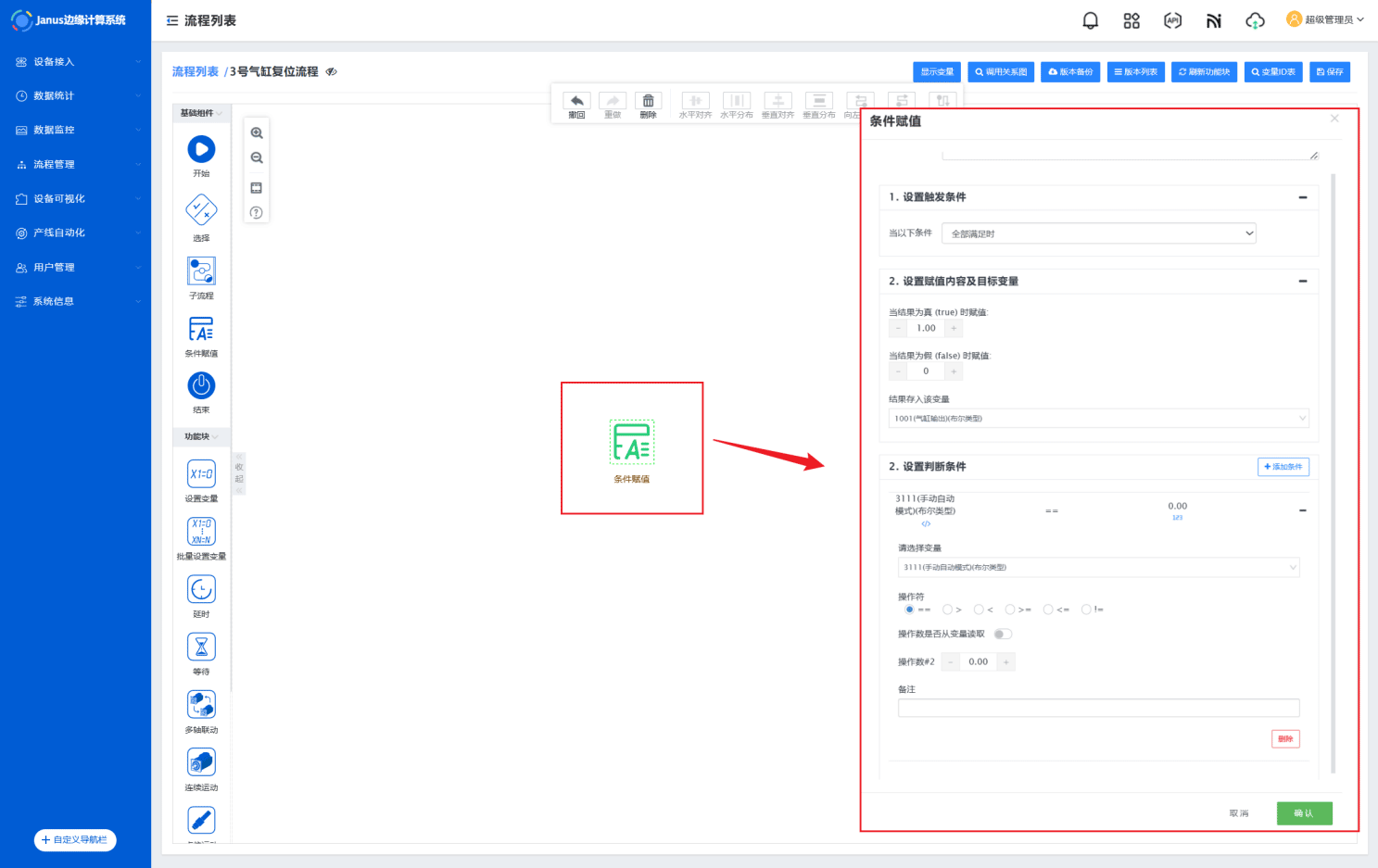
条件赋值
输出前条件限制,满足条件时才可以输出,一般用于产线的气缸互锁。
假设条件赋值按照以下例子设置,则条件赋值功能块的运行机制为:
- 如果
变量ID3111==0&&变量ID11509==1两个条件同时成立,即为真,则数据栏位1001(变量ID1001)就会成功赋值1,即ID1001==1; - 如果
变量ID3111&&变量ID11509两个条件有一个条件不成立,即为假,则数据栏位1001(变量ID1001)就会失败赋值0,即ID1001==0。
设置变量
用于变量运算,功能块设置界面如下:
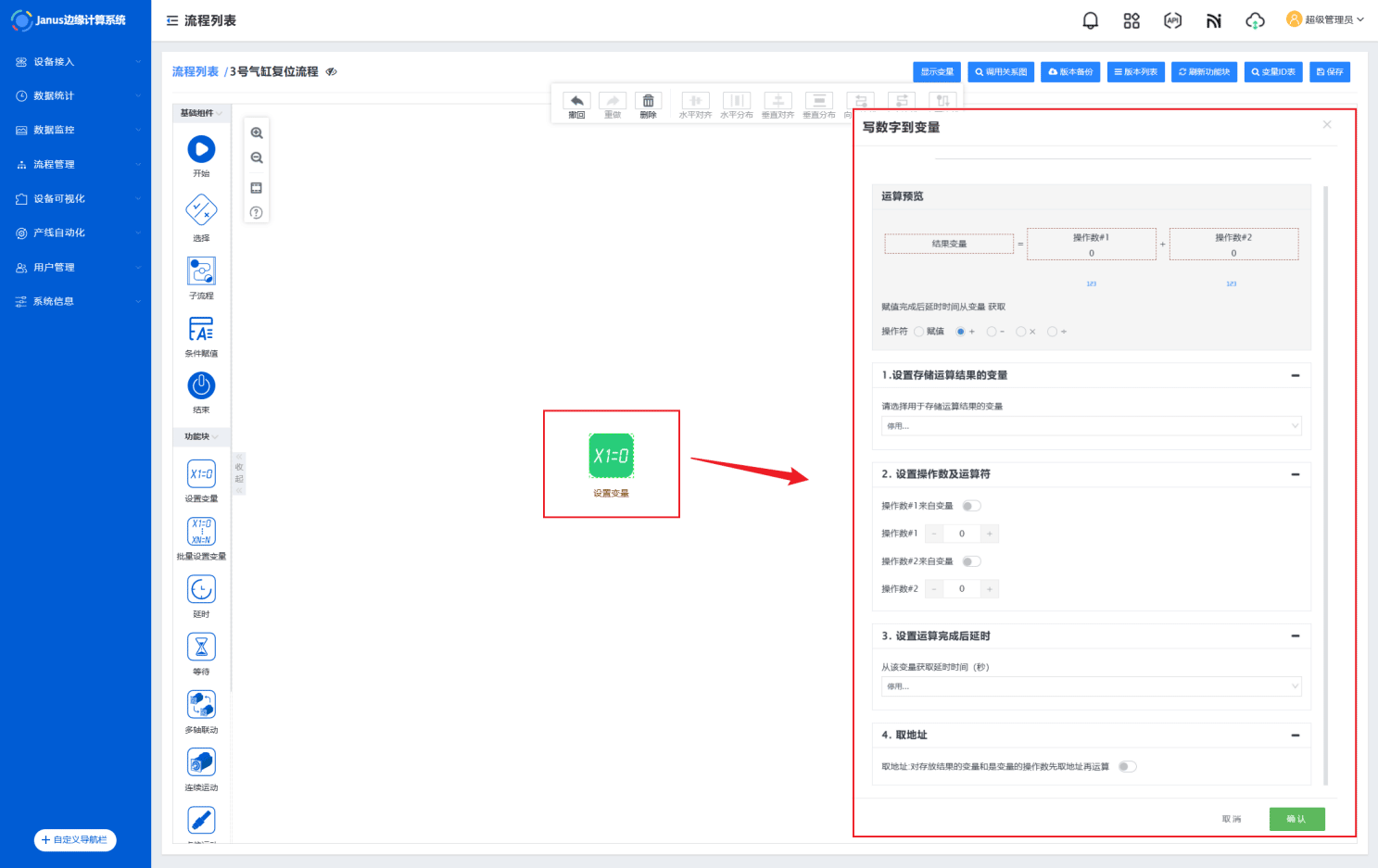
如上图所示:
- 设置存储运算结果的变量:将
操作数#1和操作数#2的运算结果赋值给指定变量ID,
即被赋值变量ID = 操作数#1 +-×÷ 操作数#2。 - 操作符:用于
操作数#1和操作数#2的数学运算,可选+(加)、-(减)、×(乘)、÷(除)数学运算及赋值;若选择赋值,则操作数只有操作数#1。 - 操作数来自变量:启用后,操作数从变量ID中获取数值进行运算;否则,操作数从输入框中获取固定数值进行运算。
- 取地址选项:
- 开启:功能块中配置的变量将作为
地址引用(指针),实际指向其他变量ID存储的值; - 关闭:功能块中的变量直接作为普通变量使用;
- 开启:功能块中配置的变量将作为
- 设置运算完成后延时:该延时设置效果与独立延时功能块等效,实际应用中可按需灵活组合配置
当控制器启用工站配置时,功能块将新增全局变量属性配置项,该配置项仅限多工站系统使用,单工站系统将自动隐藏该设置;
启用全局变量后,其与普通变量形成独立数据存储空间;全局变量作为控制器系统变量用于跨工站数据交互,普通变量作为当前工站的局部变量独立存在。
- 该变量是全局变量(共享变量):若开启,设置存储运算结果的变量ID变为全局变量;
- 操作数是全局变量(共享变量):若开启,操作数变量ID指向全局变量。
如下图变量自加1运算逻辑为例,说明设置变量功能块运作机制:
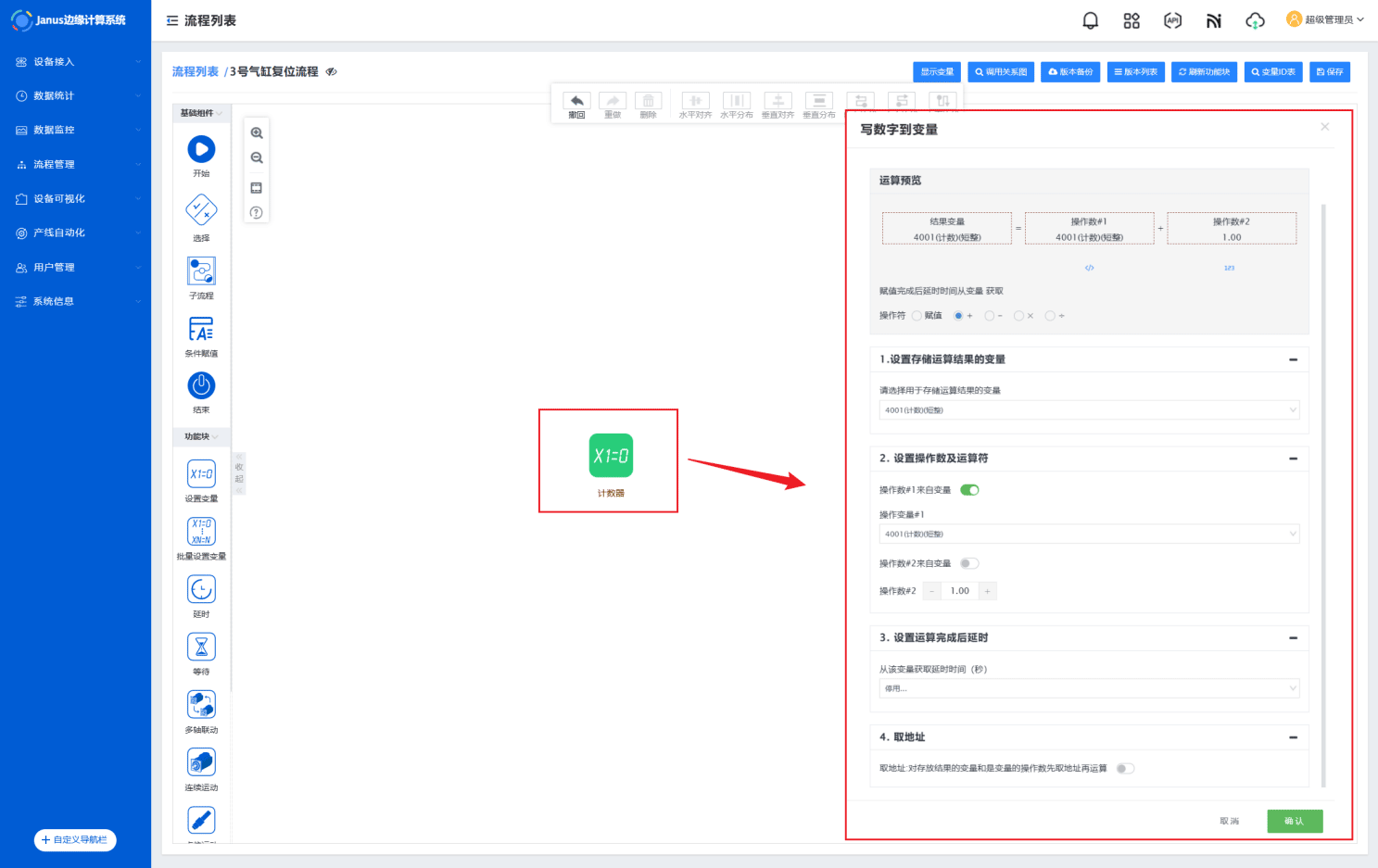
经上图设置,可构建以下赋值表达式变量ID4001 = 变量ID4001 +1,即该功能块每次运行一次则被赋值变量会自加1。
若操作变量ID里存的数值为2,则经功能块运算后赋值给变量ID4001的数值为3。
数组数值
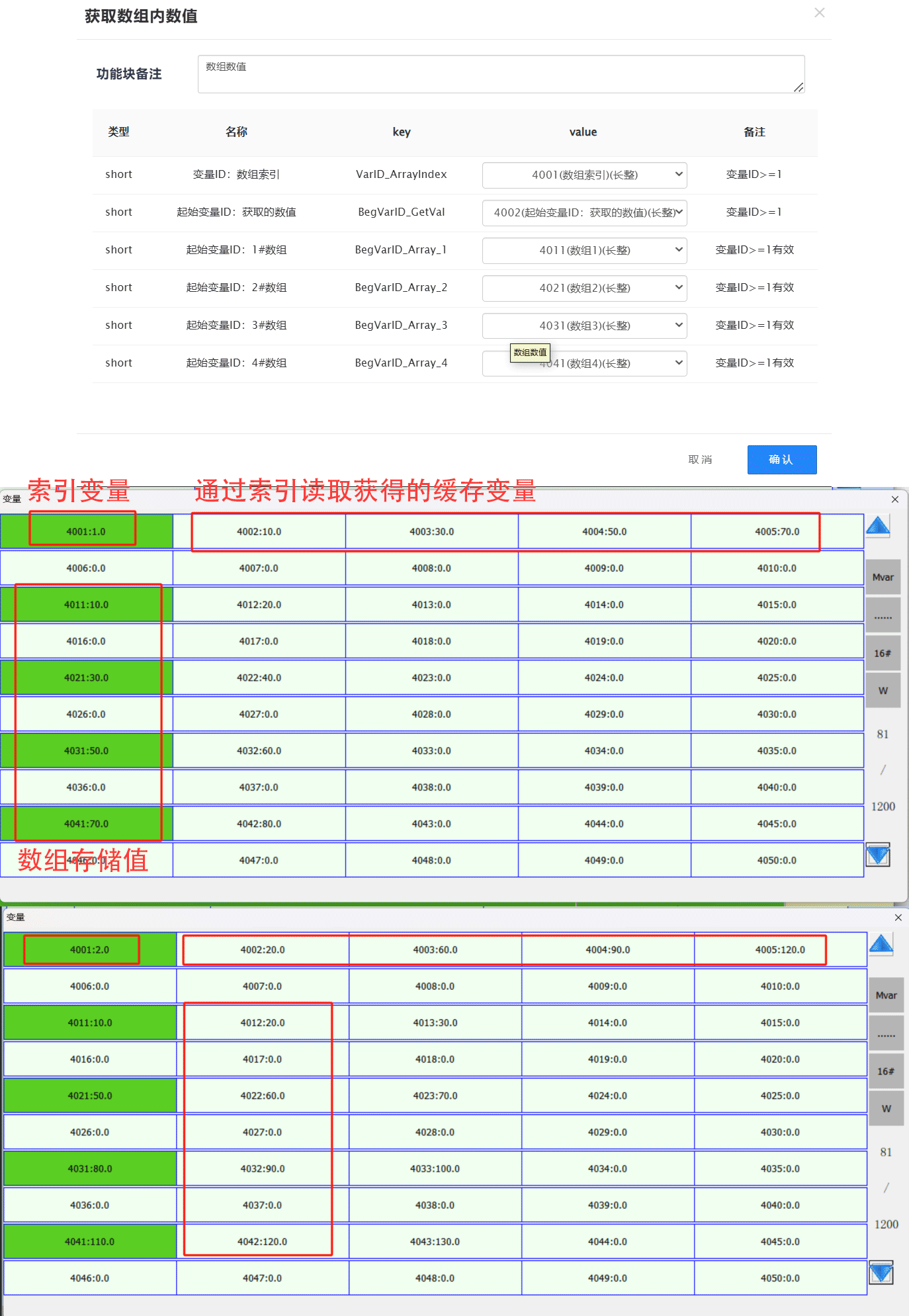
定义一个索引变量,取出数组内指定索引值,方便点阵运动,常用于点阵坐标获取。
例如:定义变量ID4001是索引,定义获取的数值起始变量ID为4002,数组1到4各存放十个变量,起始变量为4011、4021、4031、4041,当索引为1时获取第一组的值,索引为2时获取第二组的值,获取的值存放在4002到4005里面,如图所示:
批量设置变量
用于变量数值批量赋值。
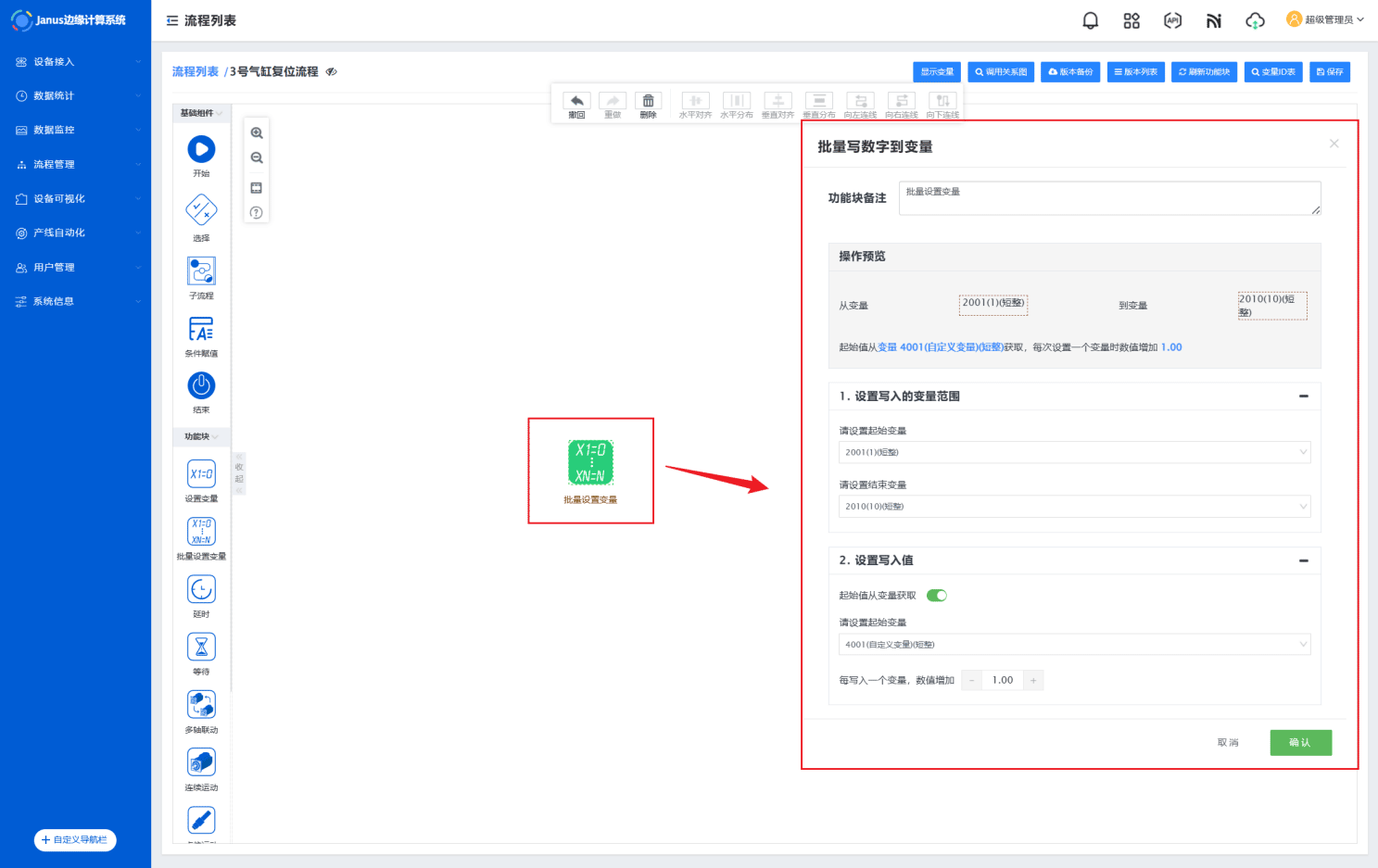
-
设置
起始变量、结束变量:选择需要批量设置变量的变量ID范围,如:起始变量2001,结束变量2005,则变量2001、2002、2003、2004、2005将进行批量设置。 -
起始值从变量获取:若启用,则需选择变量ID,该变量ID的值将作为起始值;若关闭,则需输入固定值;
-
每写入一个变量,数值增加:
- 若关闭
起始值从变量获取选项,即从起始变量开始写入,当下入下一个变量时,按照设定的增量进行数值累加。例如:设置增加值为2,初始变量ID值为0,则后续变量ID值依次为2,4,6,8,10… - 若开启
起始值从变量获取选项,即从获取的起始变量ID开始写入,按照设定的增量取下一个变量ID值。例如:设置写入数据源变量ID为1001,设置增量为2,则依次从变量ID1003、1005、1007、1009、1011…写入到对应的变量范围内。
- 若关闭
当控制器启用工站配置时,功能块将新增全局变量属性配置项,该配置项仅限多工站系统使用,单工站系统将自动隐藏该设置;
启用全局变量后,其与普通变量形成独立数据存储空间;全局变量作为控制器系统变量用于跨工站数据交互,普通变量作为当前工站的局部变量独立存在。
- 该变量是全局变量(共享变量):若开启,设置存储运算结果的变量ID变为全局变量;
- 操作数是全局变量(共享变量):若开启,操作数变量ID指向全局变量。
写字符
用于对指定变量写入字符,实现设备控制使用,通过TCP连接配置TcpUdp.txt文件完成通讯连接及变量控制地址,即可通过流程设计设置该写字符模块完成对字符串的写入控制。
:::note 注意
通常情况下一个英文字符占用1字节,中文字符占用2字节,一个系统变量可存放8字节。
字符写入将按设定分配至目标变量ID,当字符串字节长度超出单个变量容量时,系统会自动顺次写入后续变量。
:::
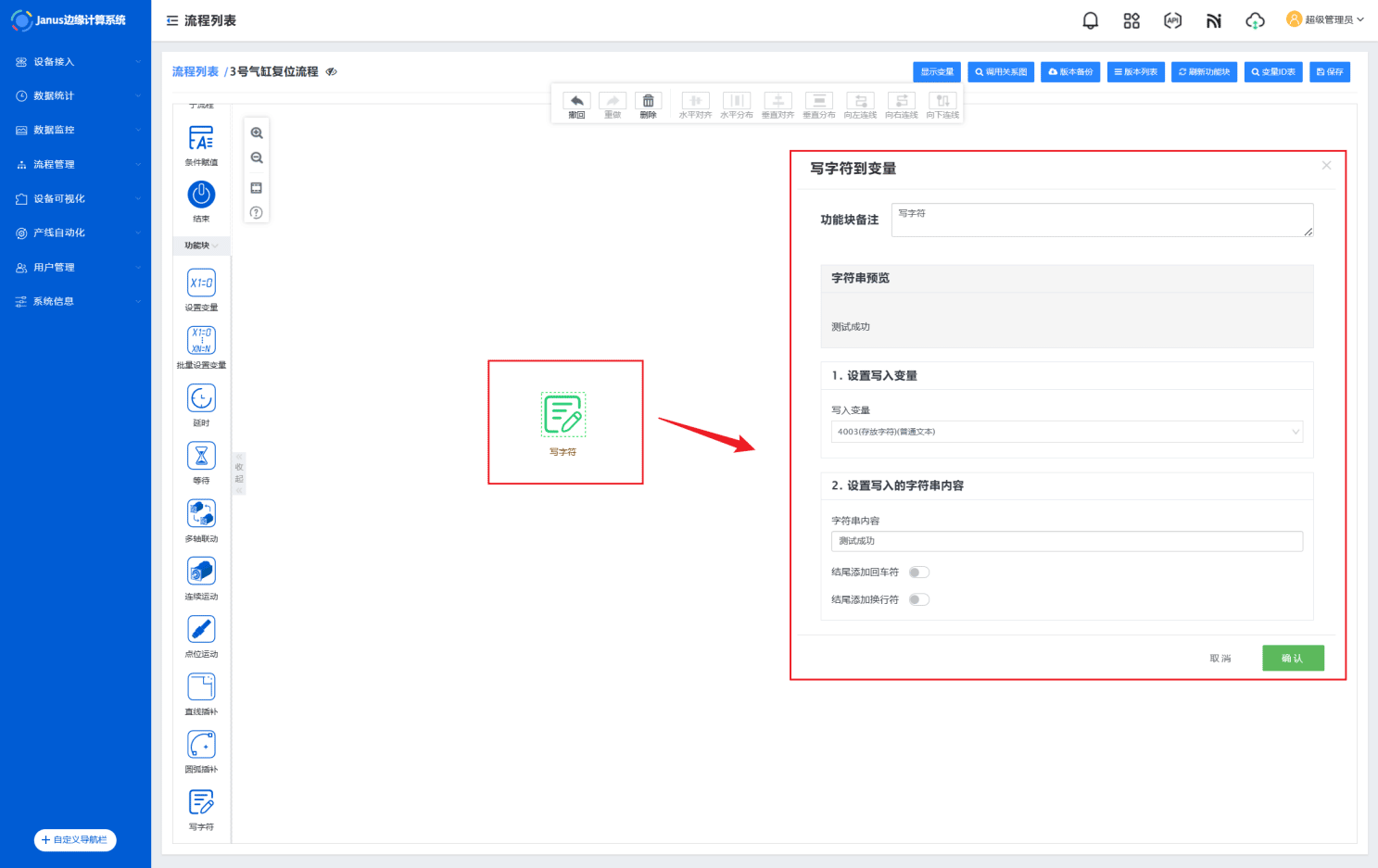
如图所示:
- 写入变量:填入需要写入字符的目标变量ID,当字符超过8字节时,将依次写入后续变量中。
- 字符串内容:填入需要写入的字符串内容。
- 结尾增加回车符(CR):开启时,增加回车符,表示结果输入时确认输入的执行命令。
- 结尾增加换行符:开启时,增加换行符,顾名思义就是文字处理中起换行的作用。
例如,字符床内容输入测试成功,设置写入变量ID4003,结尾增加回车符(CR)设置为关闭,结尾增加换行符设置为关闭,
写入的变量是全局变量设置关闭。当流程执行到此功能块时,测试成功会写入变量ID4003。
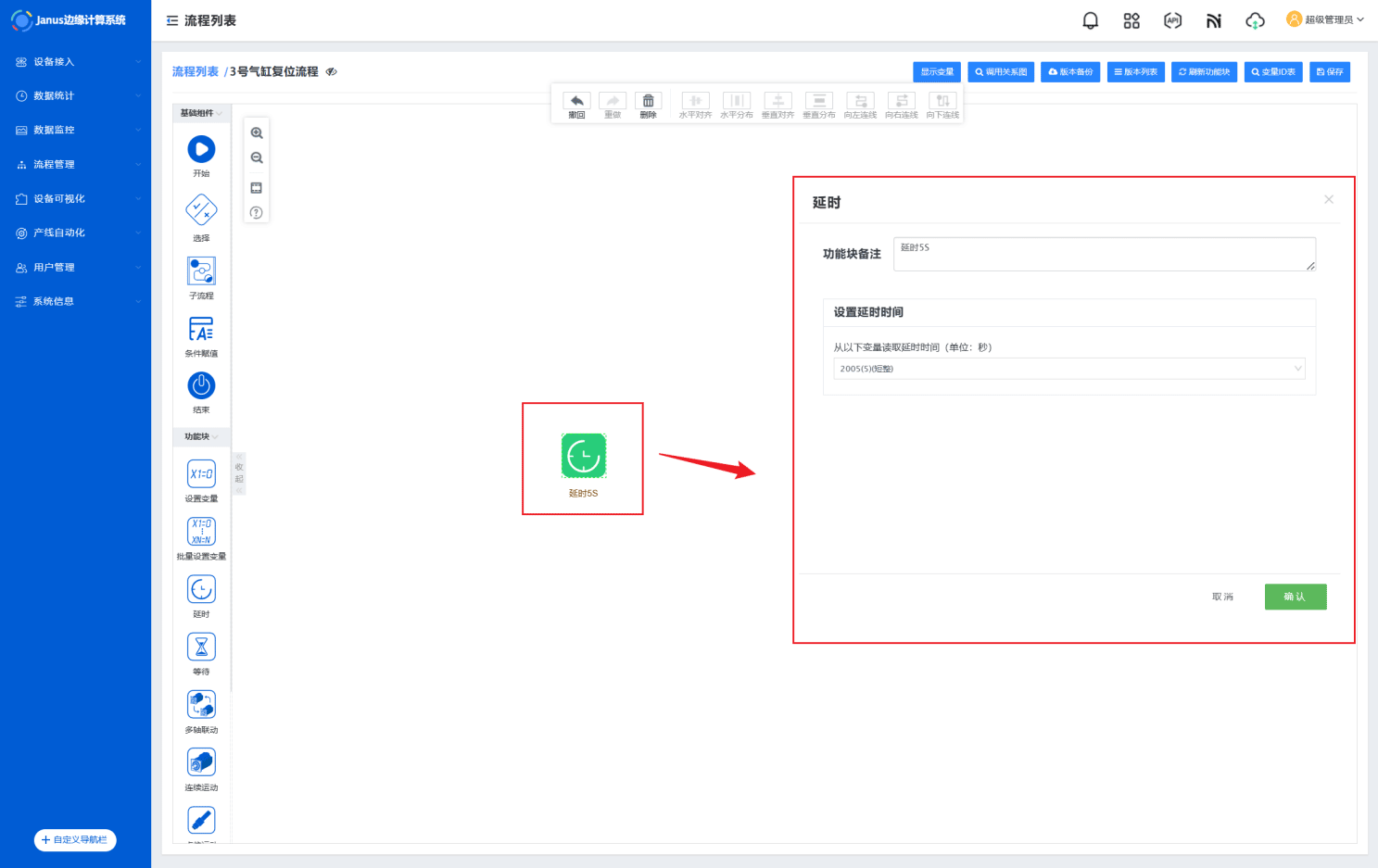
延时
用于需要延时的流程中,设置延时时间,单位:秒(s)。
延时变量ID里存的数值可以在数据初始化时对变量ID进行赋值,变量ID里存的数值才是实际的延时时间。
等待
等待功能块用于在设定时间内检测执行条件,满足条件则继续流程,超时未满足将触发报警(报警信息为功能块注释内容),可配置实现超时报警或仅提示两种模式。
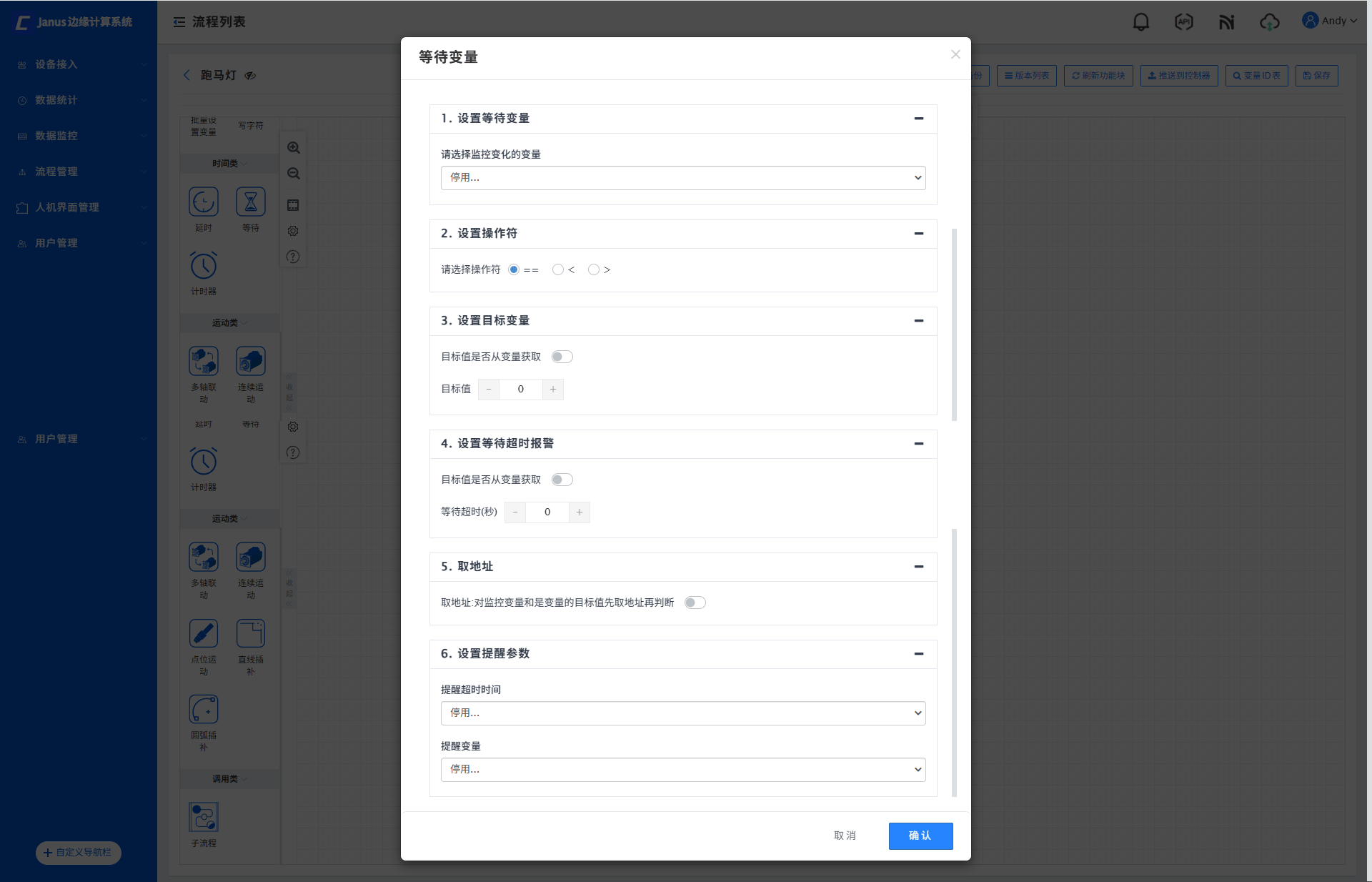
- 等待变量:输入/选择需要监控的等待变量
- 操作符:选择变量监控的比较操作符,可选
等于(==),小于(<),大于(>)。 - 目标变量:可设置目标值是否从变量获取,若开启,则需选择目标变量,若关闭,则需输入固定值;
- 等待超时报警:可设置目标值是否从变量获取,若开启,则需选择目标变量值作为等待超时报警时间;若关闭,则输入等待超时时间,单位:秒(s)。
- 取地址选项:
- 开启:功能块中配置的变量将作为
地址引用(指针),实际指向其他变量ID存储的值; - 关闭:功能块中的变量直接作为普通变量使用;
- 开启:功能块中配置的变量将作为
- 提醒超时时间:可选择需要触发提醒的变量ID,取变量ID内的值作为提醒超时时间。
- 提醒变量:用于触发提醒时按设定变量ID写入状态值,例如触发提醒时写入
1、解除时写入0,以实现提醒状态标识。
:::info 等待超时报警、等待超时提醒
等待超时报警:若触发等待超时报警,低代码系统内会出现对应的报警提醒,需要工人手动清除报警后恢复系统运行;
等待超时提醒:若触发等待超时提醒,仅向指定栏位写入提醒状态值,不会触发报警提示。
:::
计时器
计时器模块用于记录流程运行时间,每个流程最多支持50个计时器,时间单位可拆分为小时/分钟/秒;通过变量ID的1/0状态切换可控制计时启停。
双击计时器功能块可打开参数设置界面,具体配置项如下图所示:
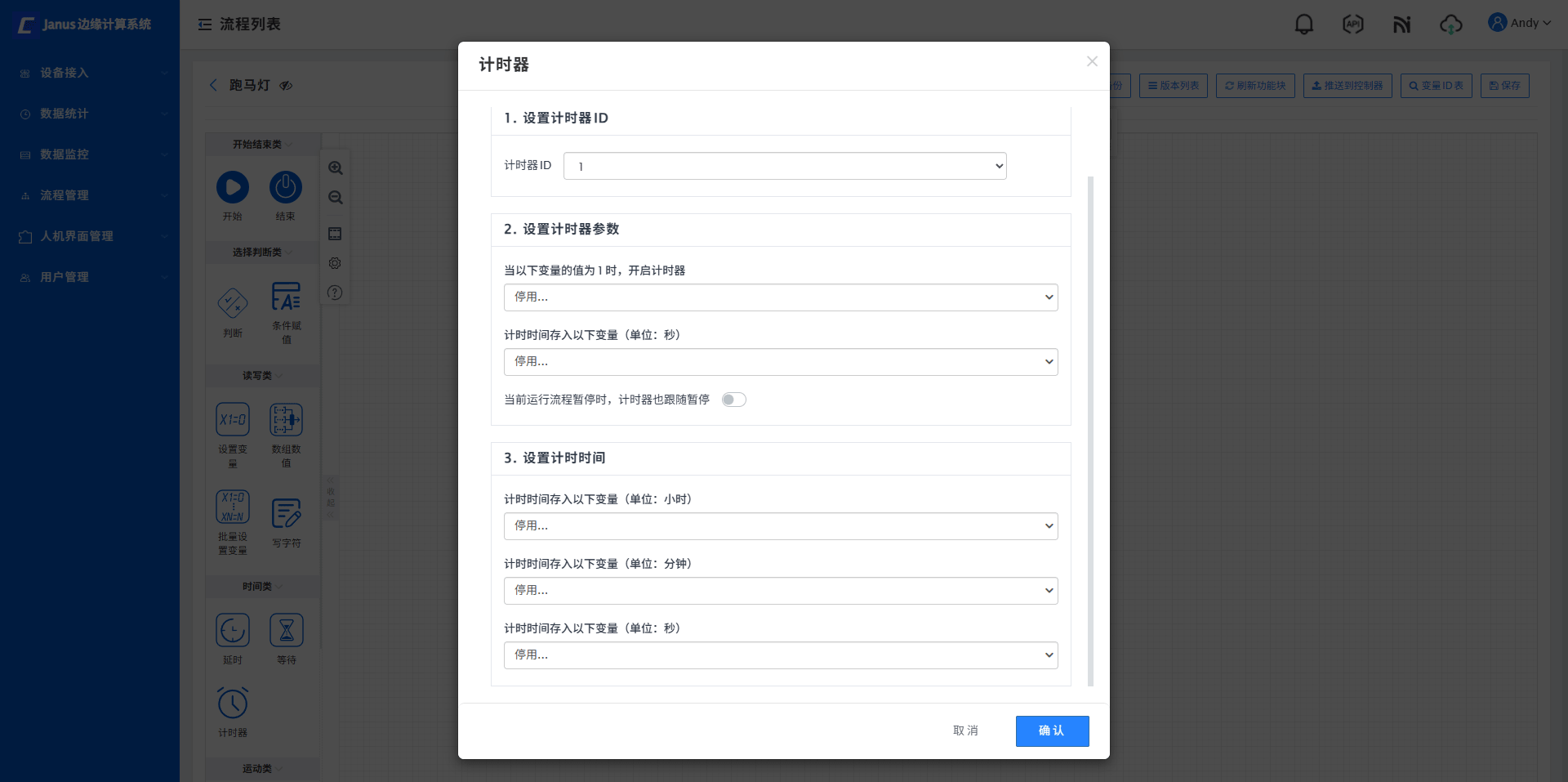
- 计时器ID:设置使用的计时器ID,可选范围
1-50。 - 计时器参数:
- 开启计时器:选择触发开启计时器的变量ID,当变量ID值为1时,计时器开始计时,为0时停止计时。
- 计时时间:选择用于存储计时时间值的目标变量ID,单位为秒(s)。
- 当前运行流程暂停时,计时器也跟随暂停:若开启,则当前流程暂停时,计时器也暂停;若关闭,则计时器不受流程暂停影响。
- 设置计时时间:将时间值按小时/分钟/秒单位拆分后分别写入对应的三个变量ID中。需要确保完整指定三个变量ID,否则无法生效。
:::info 关于计时重置
计时器功能块内部没有自动归零机制,时间变量清零操作需借助其他赋值功能块(或其他流程)实现。 重置计时时间前,需将触发开启计时器的变量置0。
:::
多轴联动
用于单轴或者多轴同时进行联动运动。多轴联动运动指的是单轴或多轴在同一速度,实现点到点之间的运动。
双击多轴联动功能块可打开参数设置界面,具体配置项如下图所示:
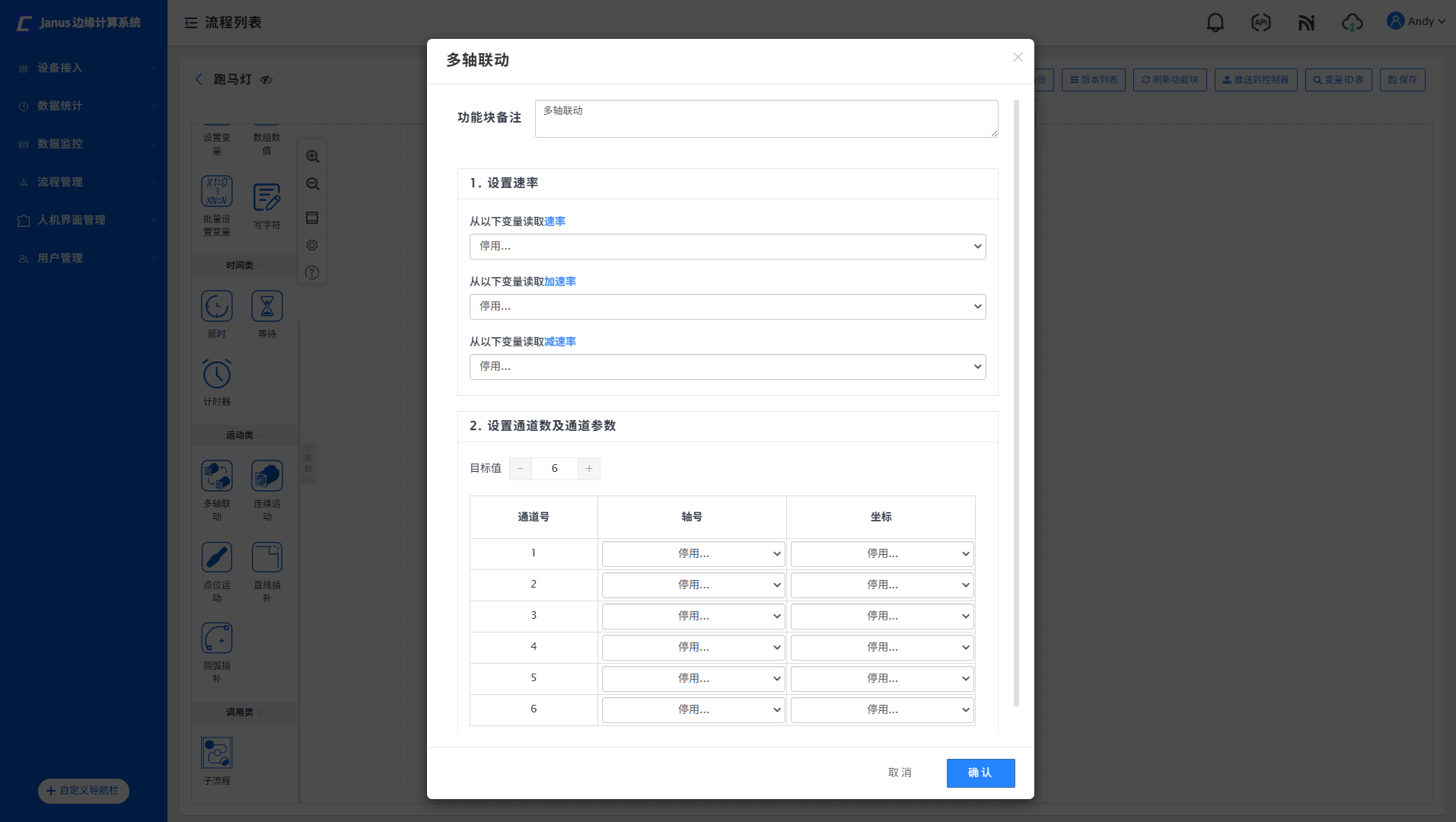
- 设置速率/加速率/减速率:选择变量ID,用于读取该变量ID值用于确定运动参数。
- 通道数及通道参数
- 目标值:支持最多6个轴同时进行多轴联动,一般情况下该设置无需调整;
- 轴号:根据资源已配置的轴参数,选择相关的可用轴,任意通道可配置任意轴,无固定轴号绑定;
- 坐标:坐标变量ID必须与通道号严格对应,如:通道1坐标变量ID必须对应通道1轴号坐标
:::info 运动参数
速率换算:速率都是按轴最大速度的百分比计算的,速率变量ID值范围为1~100,单位为百分比(%)例如:速率变量ID值为20,该轴最大速度为500mm/s,则该轴的速率为500mm/s*20%=100mm/s
加速度计算:加速率变量ID未设置或与速率变量ID相同则按速率百分比计算加速度,若不同则按其自身百分比计算,例如变量ID4083=1时对应2500mm/s²轴加速度的1%即25mm/s²(变量范围1~100%)。
减速度计算:减速率变量ID未设置或与速率变量ID相同则按速率百分比计算减速度,若不同则按自身百分比计算,例如变量ID4083=1时对应轴减速度2500mm/s²的1%即25mm/s²(变量范围1~100%)。
单位定义:移动轴单位毫米,旋转轴单位度。
:::
连续运动
用于单轴进行连续运动。
双击连续运动功能块可打开参数设置界面,具体配置项如下图所示:
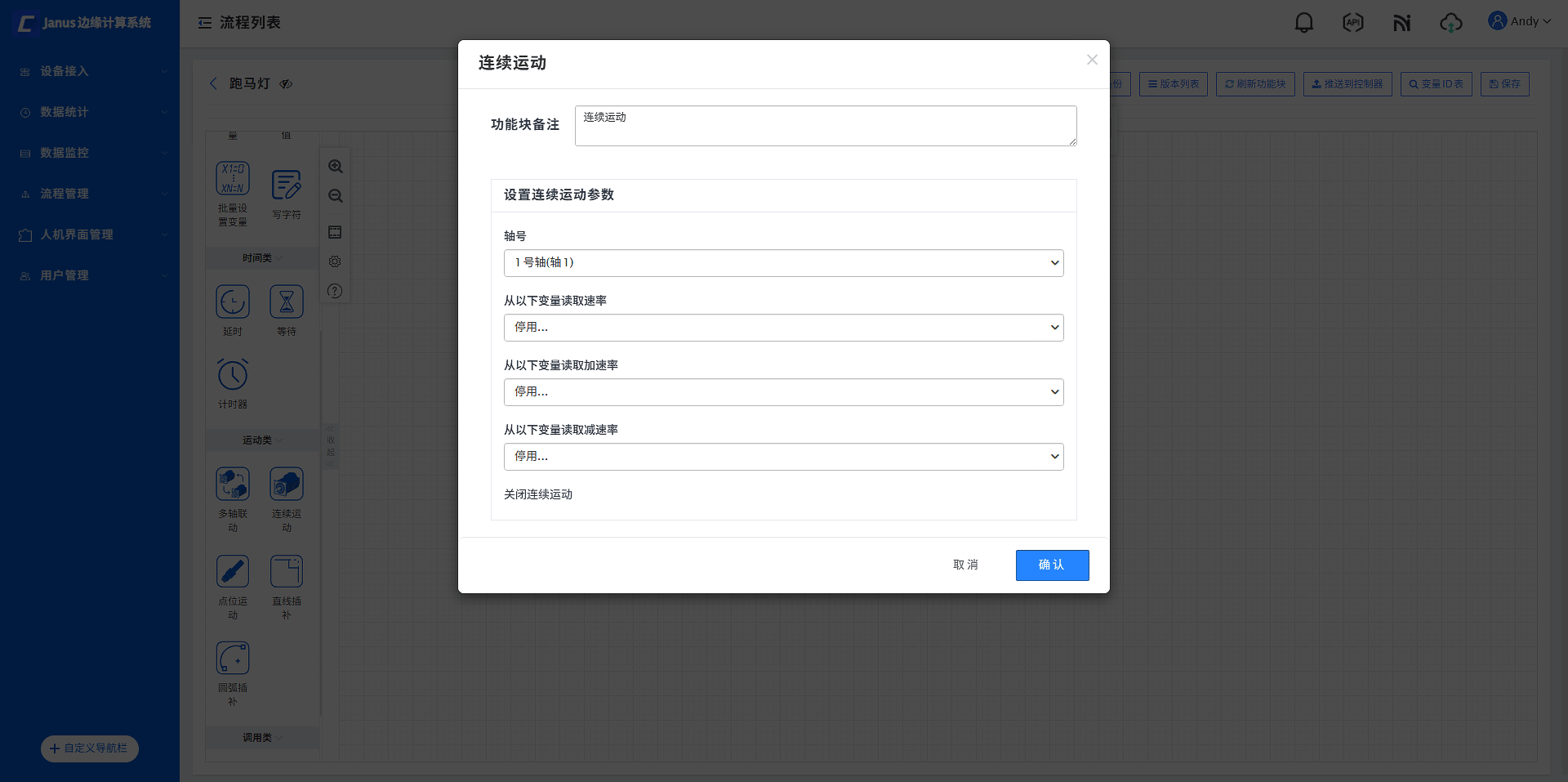
- 轴号:选择需要运动的轴
- 读取速率/加速度/减速度:选择变量ID,用于读取该变量ID值用于确定运动参数。
:::note 注意 该连续运动功能块顾名思义只适用于单轴连续运动类似于JOG运动,当速率设置为停用时,表示停止该轴连续运动。切换该轴运动模式时要先停止JOG运动(此时才会调用GT_Stop指令),否则会报错
速率都是按轴最大速度的百分比计算的,速率变量ID值的范围为-100~100,单位为百分比(%),负值跟正值代表轴的速度方向相反
:::
点位运动
用于单轴或者多轴同时进行点位运动。点位运动指的是单轴或多轴可以设置不同的速度,进行点与点之间的运动。
双击点位运动功能块可打开参数设置界面,具体配置项如下图所示:
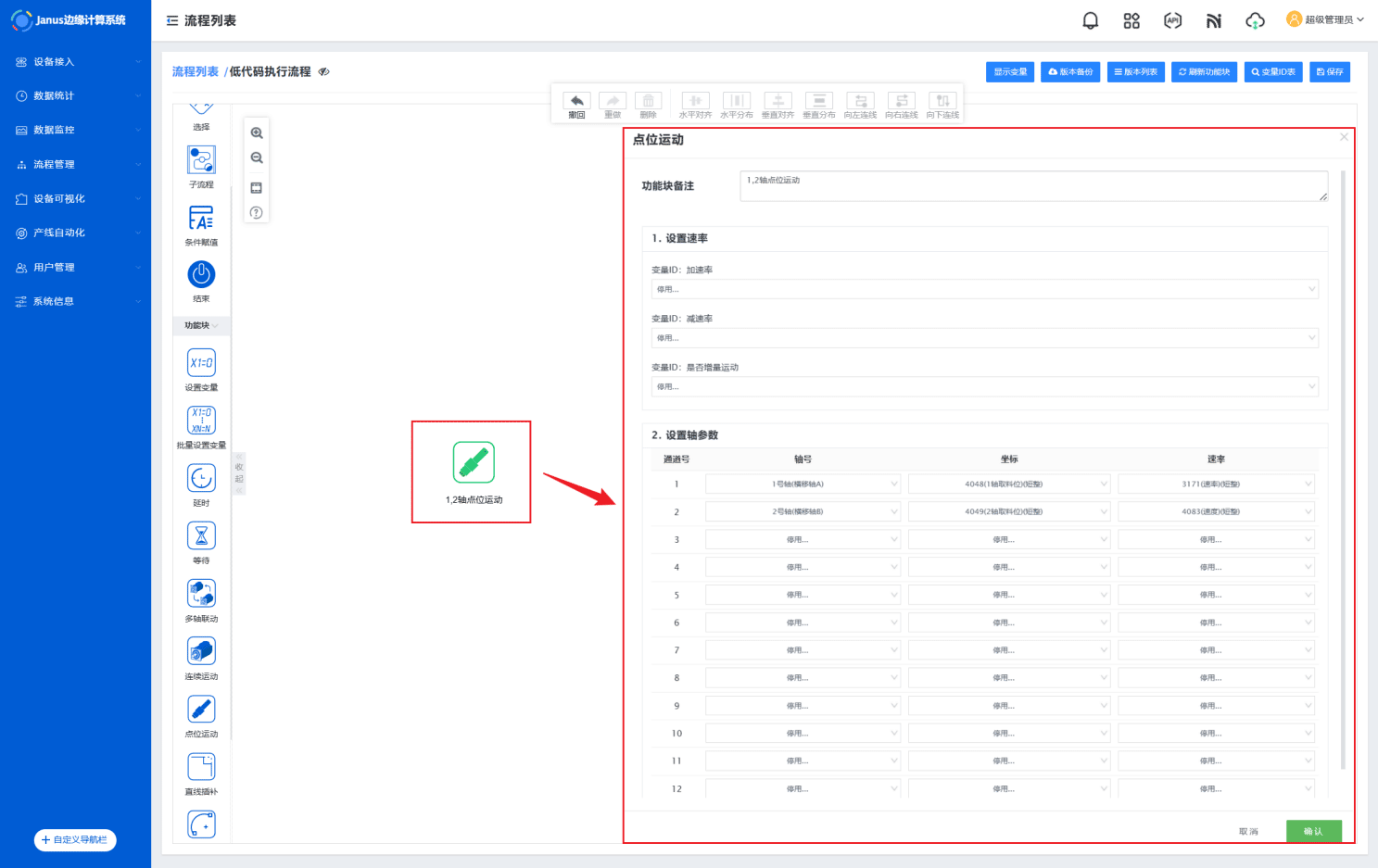
- 设置速率/加速率/减速率:选择变量ID,用于读取该变量ID值用于确定运动参数。
- 通道数及通道参数
- 目标值:支持最多6个轴同时进行多轴联动,一般情况下该设置无需调整;
- 轴号:根据资源已配置的轴参数,选择相关的可用轴,任意通道可配置任意轴,无固定轴号绑定;
- 坐标:坐标变量ID必须与通道号严格对应,如:通道1坐标变量ID必须对应通道1轴号坐标
:::info 运动参数
速率换算:速率都是按轴最大速度的百分比计算的,速率变量ID值范围为1~100,单位为百分比(%)例如:速率变量ID值为20,该轴最大速度为500mm/s,则该轴的速率为500mm/s*20%=100mm/s
加速度计算:加速率变量ID未设置或与速率变量ID相同则按速率百分比计算加速度,若不同则按其自身百分比计算,例如变量ID4083=1时对应2500mm/s²轴加速度的1%即25mm/s²(变量范围1~100%)。
减速度计算:减速率变量ID未设置或与速率变量ID相同则按速率百分比计算减速度,若不同则按自身百分比计算,例如变量ID4083=1时对应轴减速度2500mm/s²的1%即25mm/s²(变量范围1~100%)。
单位定义:移动轴单位毫米,旋转轴单位度。
:::
直线插补
直线插补运动至少需要两个轴参与,否则低代码系统会报错,进行插补运动时,将规划轴映射到相应的机台坐标系中,运动控制器根据坐标映射关系,控制各轴运动,实现要求的运动轨迹。
:::note 注意
插补功能暂时需要使用专家模式进行配置,直线插补运动功能块要结合配置文件Ctrl_Interpolation.txt一起使用,缺一不可,Ctrl_Interpolation.txt配置文件在D:\Ftp\EasyAutoSystem\System\ParaFiles文件夹目录下可以找到
:::
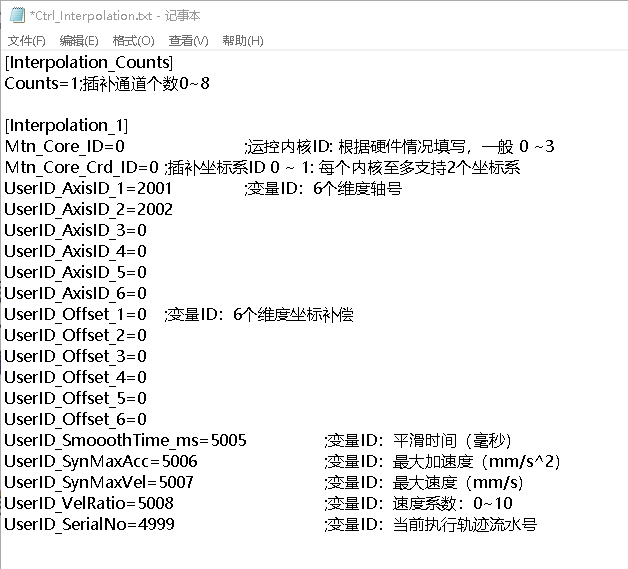
如上图配置文件所示:
-
Interpolation_Counts:插补通道个数为0~8,最多建立8组坐标系对应插补功能块插补ID(1~8)。Counts=0:不启用任意坐标系的配置Counts=1:启用Interpolation_1坐标系的配置Counts=2:启用Interpolation_1、Interpolation_2坐标系的配置(依此类推)
-
Mtn_Core_ID:运控内核ID(一般填0~3)。Mtn_Core_Crd_ID=0:插补坐标系ID范围0~1,每个内核至多支持2个坐标系
-
UserID_AxisID_1~UserID_AxisID_6:填入变量ID,指代6个维度轴号(插补运动最多支持6个轴),对应直线插补功能块的X/Y/Z/A/B/C坐标轴 -
UserID_Offset_1~UserID_Offset_6:6个维度坐标系补偿参数(与轴号一一对应),默认可不设置 -
UserID_SmoooothTime_ms:填入变量ID,插补运动完成时对应的平滑时间(单位:毫秒) -
UserID_SynMaxAcc:填入变量ID,插补运动最大加速度限制(单位:mm/s²,建议与轴参数配置一致) -
UserID_SynMaxVel:填入变量ID,插补运动最大速度限制(单位:mm/s,建议与轴参数配置一致) -
UserID_VelRatio:填入变量ID,速度系数(取值范围0~10,可实时动态调节轴速度) -
UserID_SerialNo:填入变量ID,执行轨迹流水号(每执行一段插补运动时自动+1)
以下图直线插补配置案例为例:
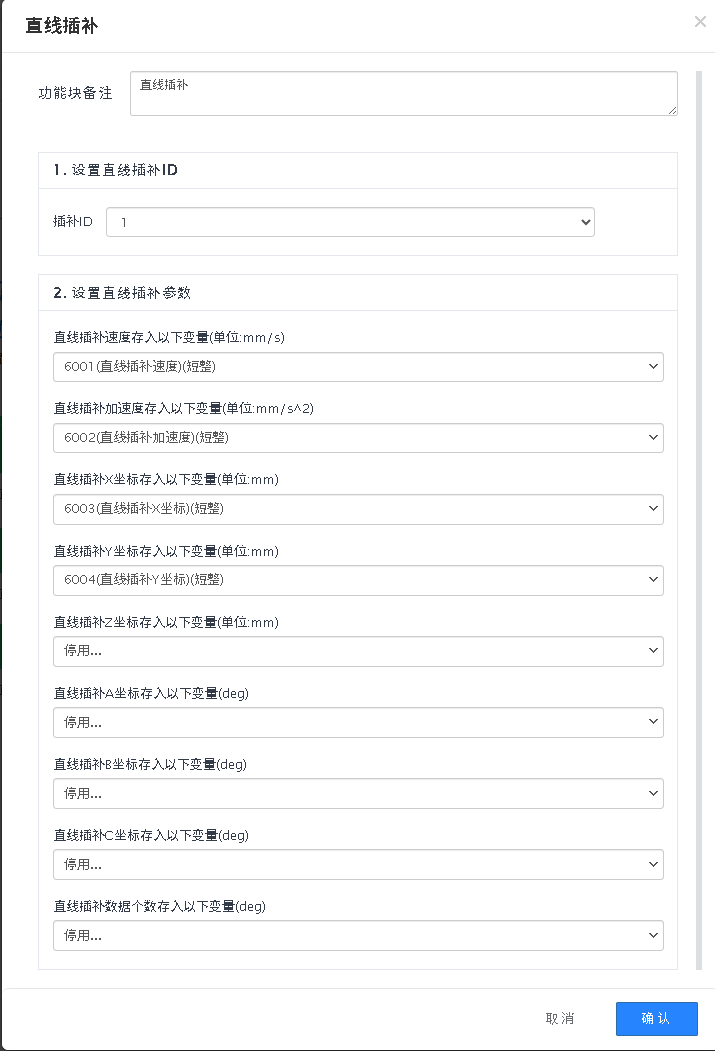
- 插补ID:为时
1代表1号坐标系,对应配置文件Interpolation_1里的配置信息。 - 直线插补速度:根据变量ID
6001的百分比值与速度系数变量ID5008的乘积计算,例如变量ID6001=20、速度系数0.1时,对应最大速度500mm/s的插补速度为10mm/s(变量范围1~100,单位%)。 - 直线插补加速度:根据变量ID
6002的百分比值与轴参数配置加速度相乘计算,例如变量ID6002=1对应2500mm/s²加速度的1%即25mm/s²(变量范围1~100,单位%)。 - 直线插补X/Y/Z/A/B/C坐标:分别对应配置文件
Interpolation_1中UserID_AxisID_1到UserID_AxisID_6所设置的轴号坐标。如上图配置文件所示,UserID_AxisID_1配置的变量ID2001表示1号轴的直线插补运动坐标为变量ID6003。 - 数据个数:正常是一次一个直线,可以弄很多小直线段,就需要数据个数(500以内)不填的话就是一个直线,填的话,上面的变量就是数组。例如:例如数据个数为
5,X轴起始变量ID4001,则X轴变量存储顺序为4001,4002,4003,4004,4005。若Y轴起始变量ID4006,则Y轴变量存储顺序为4006,4007,4008,4009,4010。如此类推,Z坐标A坐标B坐标C坐标同理。
圆弧插补
圆弧插补运动至少需要两个轴参与,否则低代码系统会报错,进行插补运动时,将规划轴映射到相应的机台坐标系中,运动控制器根据坐标映射关系,控制各轴运动,实现要求的运动轨迹。
:::note 注意
插补功能暂时需要使用专家模式,圆弧插补运动功能块要结合配置文件Ctrl_Interpolation.txt一起使用,缺一不可,Ctrl_Interpolation.txt配置文件在D:\Ftp\EasyAutoSystem\System\ParaFiles文件夹目录下可以找到
:::
如上图配置文件所示:
-
Interpolation_Counts:插补通道个数为0~8,最多建立8组坐标系对应插补功能块插补ID(1~8)。Counts=0:不启用任意坐标系的配置Counts=1:启用Interpolation_1坐标系的配置Counts=2:启用Interpolation_1、Interpolation_2坐标系的配置(依此类推)
-
Mtn_Core_ID:运控内核ID(一般填0~3)。Mtn_Core_Crd_ID=0:插补坐标系ID范围0~1,每个内核至多支持2个坐标系
-
UserID_AxisID_1~UserID_AxisID_6:填入变量ID,指代6个维度轴号(插补运动最多支持6个轴),对应直线插补功能块的X/Y/Z/A/B/C坐标轴 -
UserID_Offset_1~UserID_Offset_6:6个维度坐标系补偿参数(与轴号一一对应),默认可不设置 -
UserID_SmoooothTime_ms:填入变量ID,插补运动完成时对应的平滑时间(单位:毫秒) -
UserID_SynMaxAcc:填入变量ID,插补运动最大加速度限制(单位:mm/s²,建议与轴参数配置一致) -
UserID_SynMaxVel:填入变量ID,插补运动最大速度限制(单位:mm/s,建议与轴参数配置一致) -
UserID_VelRatio:填入变量ID,速度系数(取值范围0~10,可实时动态调节轴速度) -
UserID_SerialNo:填入变量ID,执行轨迹流水号(每执行一段插补运动时自动+1)
双击圆线插补功能块,可对该功能块进行设置。
以下图圆弧半径插补配置案例为例:
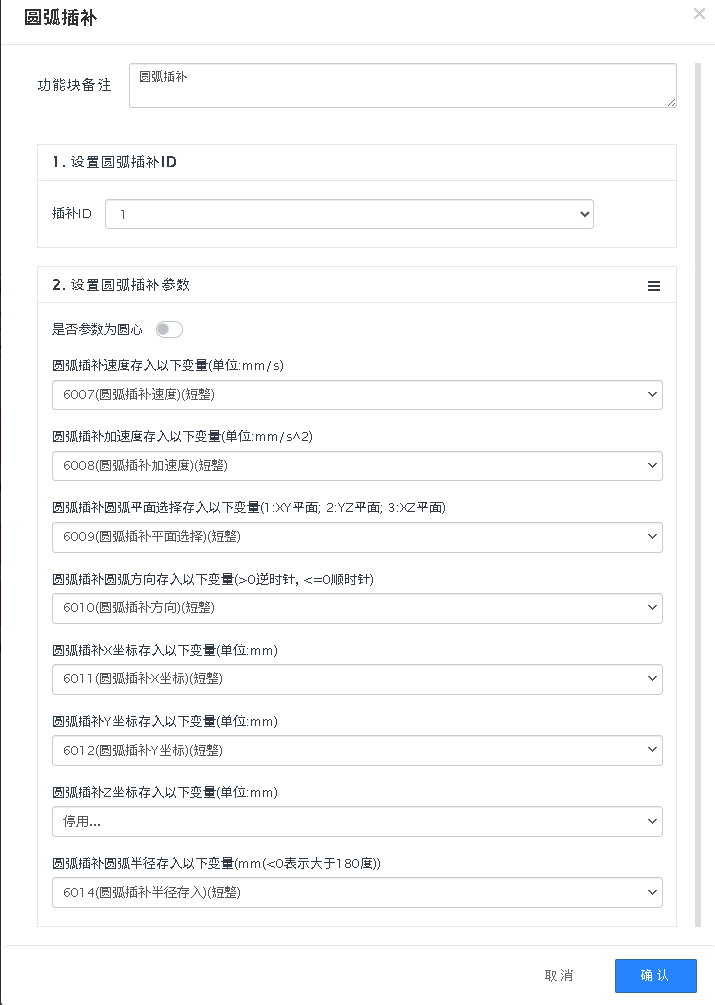
- 插补ID:为时
1代表1号坐标系,对应配置文件Interpolation_1里的配置信息。 - 是否参数为圆心:默认不启用,表示圆弧插补是以半径为基准点,如果启用,表示圆弧插补是以圆心为基准点。
- 圆弧插补速度:变量ID
6007里存的数值为该功能块各轴圆弧插补运动的速度,Interpolation_1配置信息里速度系数变量ID5008的取值范围为0~10。例如:圆弧插补速度变量ID6007=20,该轴参数配置最大速度为500mm/s,速度系数变量ID5008=0.1,则圆弧插补速度=20%×500mm/s*0.1=10mm/s。(注意:圆弧插补速度是按轴最大速度的百分比*速度系数计算的,速度变量ID6007的取值范围为1~100,单位为百分比%) - 圆弧插补加速度:变量ID
6008里存的数值为该功能块各轴圆弧插补运动的加速度。例如:圆弧插补加速度变量ID6008=1,轴参数配置里该轴的加速度为2500mm/s²,则圆弧插补加速度=1%×2500mm/s²=25mm/s²。(注意:圆弧插补加速度是按照圆弧插补加速度变量ID里存的值的百分比*轴参数配置的加速度计算的,变量ID里存放的值的大小跟圆弧插补速度范围为1~100,单位百分比%) - 圆弧插补平面圆弧选择:变量ID
6009里存的数值指的是在哪个平面上进行圆弧插补运动,依右手坐标系统1:XY平面、2:YZ平面、3:XZ平面。 - 圆弧插补圆弧方向:变量ID
6010里存的数值指的是选择顺时针或者是逆时针进行圆弧插补运动,依右手坐标系统:Y->X为顺时针,X->Y为逆时针。如果是逆时针,变量ID6010里存入的数值要>0,比如ID6010=1;如果是顺时针,变量ID6010里存入的数值要<=0,比如ID6010=0,或者ID6010=-1。(注意:圆弧插补圆弧方向变量ID里的取值范围为-1~1) - 圆弧插补X坐标:圆弧插补X坐标为圆弧插补运动配置文件
Interpolation_1里UserID_AxisID_1配置对应轴号的坐标,比如配置文件Interpolation_1里UserID_AxisID_1配置的变量ID2001代表1号轴的圆弧插补运动坐标为ID6011。圆弧插补Y坐标为配置文件Interpolation_1里UserID_AxisID_2里对应轴号的坐标。圆弧插补Z坐标为配置文件Interpolation_1里UserID_AxisID_3里对应轴号的坐标。 - 圆弧插补圆弧半径:变量ID
6014里存的数值指的是圆弧插补运动以半径为基准时的半径大小,如果圆弧的起点位置和终点构成的角度大于180度时,圆弧半径要取负值,如果圆弧的起点位置和终点构成的角度小于180度时,圆弧半径要取正值。
以下图圆弧圆心插补配置案例为例:
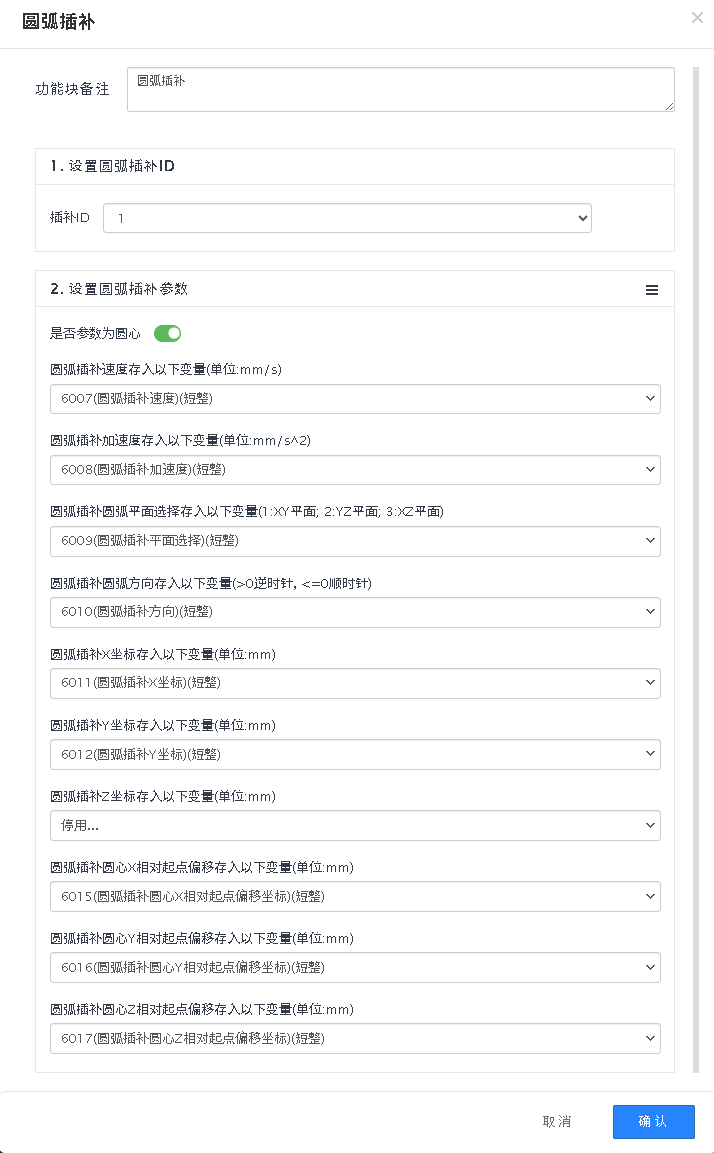
- 插补ID为1指的是1号坐标系,对应图52配置文件
Interpolation_1里的配置信息。 - 是否参数为圆心:默认不启用,表示圆弧插补是以半径为基准点,如果启用,表示圆弧插补是以圆心为基准点。
- 圆弧插补速度:变量ID
6007里存的数值为该功能块各轴圆弧插补运动的速度(注意:圆弧插补速度是按轴最大速度的百分比*速度系数计算的,速度变量ID6007的取值范围为1~100,单位为百分比%),Interpolation_1配置信息里速度系数变量ID5008的取值范围为0~10。例如:圆弧插补速度变量ID6007=20,该轴参数配置最大速度为500mm/s,速度系数变量ID5008=0.1,则圆弧插补速度=20%×500mm/s*0.1=10mm/s。 - 圆弧插补加速度:变量ID
6008里存的数值为该功能块各轴圆弧插补运动的加速度。(注意:圆弧插补加速度是按照圆弧插补加速度变量ID里存的值的百分比*轴参数配置的加速度大小计算的,变量ID里存放的值的大小跟圆弧插补速度一样范围为1~100,单位百分比%)。例如:圆弧插补加速度变量ID6008=1,轴参数配置里该轴的加速度为2500mm/s²,则圆弧插补加速度=1%×2500mm/s²=25mm/s²。 - 圆弧插补平面圆弧选择:变量ID
6009里存的数值指的是在哪个平面上进行圆弧插补运动,依右手坐标系统1:XY平面、2:YZ平面、3:XZ平面。 - 圆弧插补圆弧方向:变量ID
6010里存的数值指的是选择顺时针或者是逆时针进行圆弧插补运动,依右手坐标系统:Y->X为顺时针,X->Y为逆时针。如果是逆时针,变量ID6010里存入的数值要>0,比如ID6010=1;如果是顺时针,变量ID6010里存入的数值要<=0,比如ID6010=0,或者ID6010=-1。(注意:圆弧插补圆弧方向变量ID里的取值范围为-1~1) - 圆弧插补X坐标:圆弧插补X坐标为圆弧插补运动配置文件
Interpolation_1里UserID_AxisID_1配置对应轴号的坐标,比如配置文件Interpolation_1里UserID_AxisID_1配置的变量ID2001代表1号轴的圆弧插补运动坐标为ID6011。圆弧插补Y坐标为配置文件Interpolation_1里UserID_AxisID_2里对应轴号的坐标。圆弧插补Z坐标为配置文件Interpolation_1里UserID_AxisID_3里对应轴号的坐标。 - 圆弧插补圆心X相对起点偏移坐标:变量ID
6015里存的数值指的是圆心插补X相对起点偏移的坐标,根据实际圆弧插补运动计算即可,目的是确定圆心的X坐标。 - 圆弧插补圆心Y相对起点偏移坐标:变量ID
6016里存的数值指的是圆心插补Y相对起点偏移的坐标,根据实际圆弧插补运动计算即可,目的是确定圆心的Y坐标。 - 圆弧插补圆心Z相对起点偏移坐标:变量ID
6017里存的数值指的是圆心插补Z相对起点偏移的坐标,根据实际圆弧插补运动计算即可,目的是确定圆心的Z坐标。
子流程
当一个流程较复杂时,我们一般将其拆分为一个主流程和一个或多个子流程,主流程可以通过调用子流程来达到简化的目的,方便我们设计。在主流程中添加子流程模块进行设置来关联多个流程。
双击子流程功能块可选择已经设计好的子流程。相关例程如下图所示:
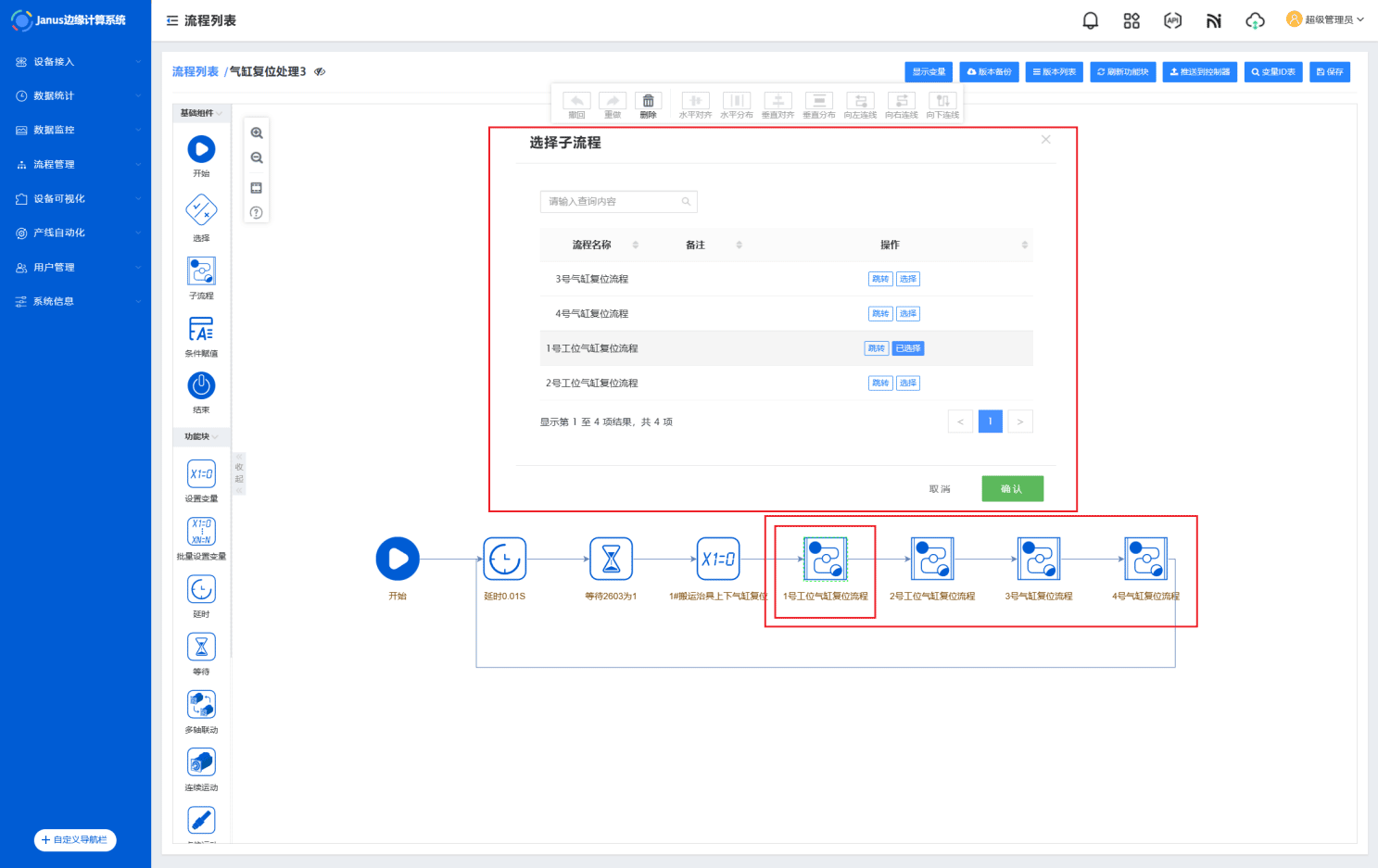
点击子流程功能块,找到需要添加的子流程,点击选择此流程保存即可添加成功。